I use copter 4.0.3 firmware, Lightware SF20/b rangefinder and IRlock sensor is attached
In same day, we tested our drone to do a mission flight.
First flight was conducted at playground which located at 50m AMSL.
Drone flew stable and safe in normal way. I attach some log below
// it takes 3 min to open this link, thanks for your patient
Second flight was conducted near river, where located at 16m AMSL
Drone took off well but it hesitated to climb around 5m altitude.
I tried three times but all the results were same, It didn’t climb up, I canceled mission with mode change.
Manual flight in loiter mode was normal.
In last flight near river, I kept pushing drone to continue the mission.
After stagnation around 5m height, It slowly climbed up and reached to mission altitude 30m.
For a while, It seemed normal mission flight was conducted, but in descend to 10m altitude,
It hesitated again to descend and went down very very slow. (descend speed was set to 0.5m/s, but it was seemed about 0.1m/s)
Below link is the log (near river)
https://inha0-my.sharepoint.com/:u:/g/personal/12160446_inha_edu/ESZdcTTHaxZHooNwID3YtloBeu8ra0kfKQJgG3xdiq2T8Q?e=jRaFWv
All parameters were same, payload was same, even the battery was used again without charging.
Only difference is presence of IRlock( Pixy cam), and location.
This is what i found in comparison of two logs (CTUN - DAlt, Alt)
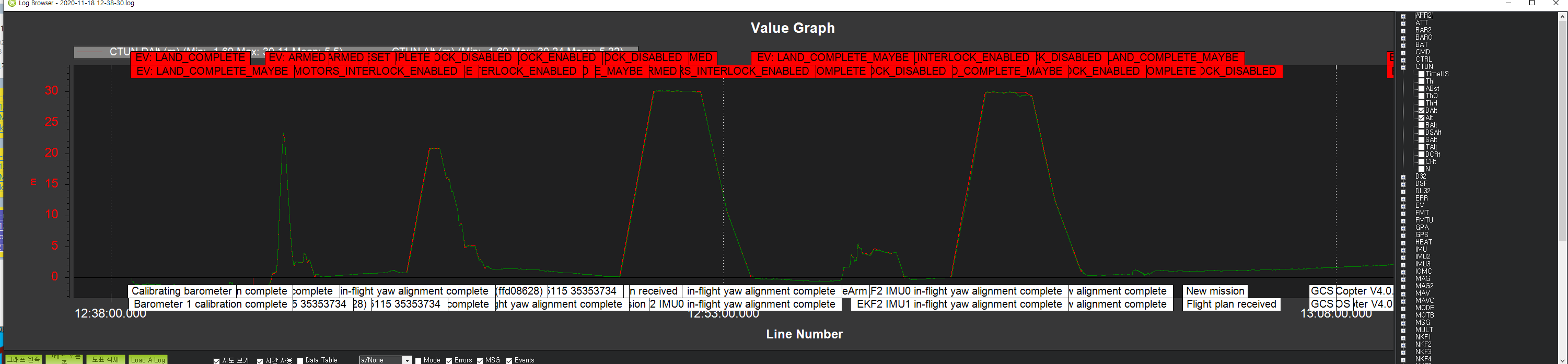
Successful flight DAlt(desired alt) is linear setpoint to target altitude.

But with the failure near river, DAlt is not linear and even decreased in takeoff phase.
I’m so confused with this error. What is a difference of these two case? and How can I solve this problem?
Please help me…