On the bench, It’s armed, throttle >0 and the FC correctly goes into RTL when I turn off
transmitter, However when TX is switched back on and RC signal is recovered it disarms (kills the motors dead) before I can toggle flight mode to ‘stabilise’.
My concern is if it was flying back to me and regained the lost RC signal it’s just going to plummet to the ground !
Am I missing something? or being stupid with my settings.?
I suspect that could just be a symptom of bench testing (the copter is not flying so disarms) however the advice I would give is:
If there is an RC failsafe allow the copter to complete the RTL uninterrupted and when the copter is back on the ground investigate and mess around all you like.
I agree that it’s possible/likely that RTL thinks that the vehicle has landed and that is what is causing the vehicle to disarm.
Another possibility is related to the mode switch. The default ArduPilot RC setup is to use RC input channel 5 for the mode switch. On a Herelink though this is normally mapped to be the rotating dial on the top left of the ground unit.
Normally it’s best when using the Herelink to set the modes with the buttons on the bottom of the ground unit and/or use QGC’s mode selector drop-down.
Thanks for your replies guys, last night whilst trying to sleep it occurred to me that as the 'copter actually is at ‘home’ and zero altitude would be why it disarmed so quickly. Your thoughts have confirmed that. Thank You
I have flightmode on CH5 and using the switches A B C, it is set to start up in ‘stabilise’
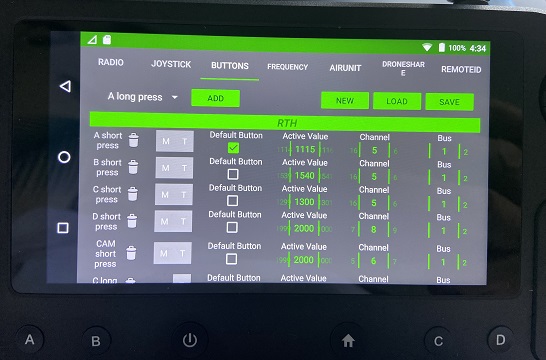
Is this because you have Herelink selecting channels with Mavlink commands instead of serial port values? I’ve set my switches up as below so the actions come in on the serial channels much like a convential transmitter setup. Is there a danger with this method?
Great that you’re making progress. I think that setup for the channels is also fine. It may actually be safer because the way you’re doing it means that the RC input is handled at a lower level so even if QGC crashes you’ll still be able to change flight modes.
The manufacturer recommends not doing that so I would assume there are valid reasons not to do that.
It is a bit like Ch5 arming in ELRS and Betaflight Arm/Disarm switch except ELRS team clearly stated the reason why you should do that. Ardupilot recommendation is not to use Arm/Disarm switch on flying vehicles as Disarm is forced ie. the vehicle will disarm in flight when the switch is brought low by accident and it likely will not be possible to arm it again (especially for copter).
I’ve re-read the manufacturers user manual and yes, @LupusTheCanine it does clearly say that flight modes should be on Mavlink commands not S-BUS
However SBUS is solid as long as the GS is powered on, so @rmackay9 has good point with ‘what happens if QGC crashes’ The craft is going to continue to fly based on last command until you can re-start QGC to regain control
So I’m a bit unsure on what to do
I suspect I’ll put it on Mavlink (as manufactures etc…) and re-think if I get QGC problems