We have been flying the copter and it didn’t seem to slow down while landing even below 10 meters. What could be the reason for the same?
Please find the log attached.
https://drive.google.com/drive/folders/1qvfDqynJriOMRh0-SDaNlx6Uk4N90hZT?usp=sharing
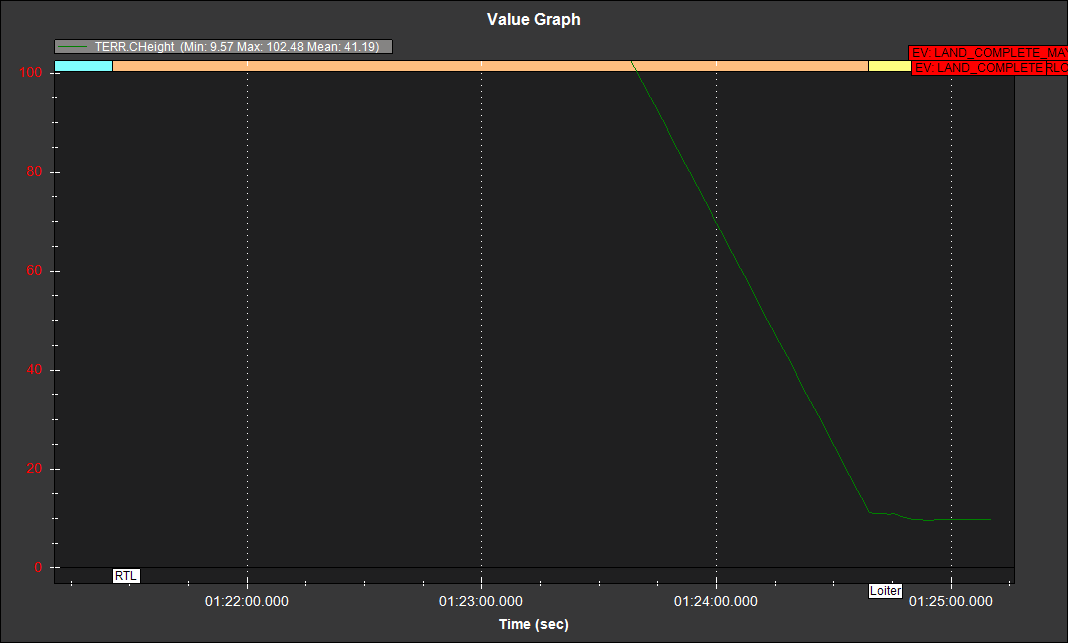
I don’t have a root cause as to why terrain height seems to differ from reality, but your copter thought it was above 10m until the very last moments of the flight, where it dips down to 9.57.
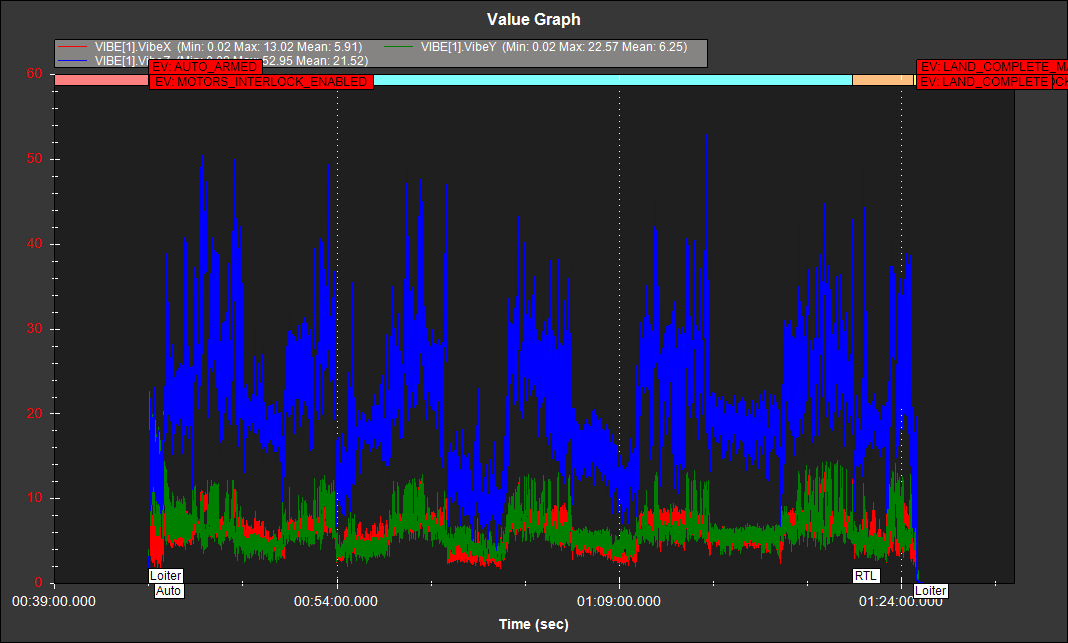
You also have very high vibrations and no notch filter enabled, both of which should be addressed to improve performance overall. I didn’t dig any deeper into the log than that, but I suspect the overall tune could likely be improved. This will not necessarily address the terrain height issue observed above, it’s just good practice.
Use this: Quick start guide | MethodicConfigurator to fix some of the issues.
Thank you Yuri for spending time to go through the log.
I do agree with the vibration part. It’s still a work in progress.
With regard to terrain altitude. Is there a parameter to slow down the copter based on the baro altitude instead?
This looks interesting. Let me go through this.