The copter is drawing about 55-60 amps during hover which feels very high for a copter of this size, also the motors are unusually hot, even after a 30-60sec hover they are almost too hot to touch. The autotune PIDs were too high, and although no vibrations were observed with the autotune PIDs I have still significantly reduced the PIDs. However, the issue still persists. Can anyone take a look at the logs and tell me what could be the possible reasons for this?
Without having seen the logs (because I’m currently mobile) and without more information this seems quite normal to me.
What props are you using?
What battery do you have?
What’s the overall weight of the drone?
What flight time do you expect from this setup? (only if you have calculated a theoretical value)
“Almost too hot to touch” (below 40°C) is perfectly fine, especially after 60 sec flight. 90°C and more becomes critical. Get yourself an infrared thermometer to check it more accurately.
I am using the following
Nazgul 6x4x3 props.
Battery: Bonka 8000mah 6s 35C
Total weight: 3.24Kg
Expected flight time :10-15mins now we are getting about 7-8mins
Well we are from India and now its summer time, the abient temperatures here are around 30-35C when we were testing. Motors are definitely warmer than 40C, close to 80-90C. will get a thermometer and confirm the reading.
Yes the PSC_ACCZ_I and PSC_ACCZ_P values are higher than the recommended values because we were getting very poor alt hold performance with the recommended values. I will try it again by lowering it to see if that has an effect on the motor temp.
I am using the following
Nazgul 6x4x3 props.
Battery: Bonka 8000mah 6s 35C
Total weight: 3.24Kg
Thank you for the suggestion. I have already followed multiple tuning guides and spent a good amount of time tuning this copter. Just trying to learn here what could be the possible reasons for such high current draw and motor temp.
So I just put your configuration through eCalc, these are the results:
The expected flight time according to eCalc matches your meassurements quite nicely.
The calculated hover current is a little lower than what you are seeing, but this is only the propulsion system and doesn’t take FC, camera, RC system, etc. into account.
And yes, eCalc also predicts hot motors.
According to the manufacture’s specs, with that 8000mAh battery the drone is 634 grams over weight. Just because you add a bigger battery does not always mean you can extend the flight time…
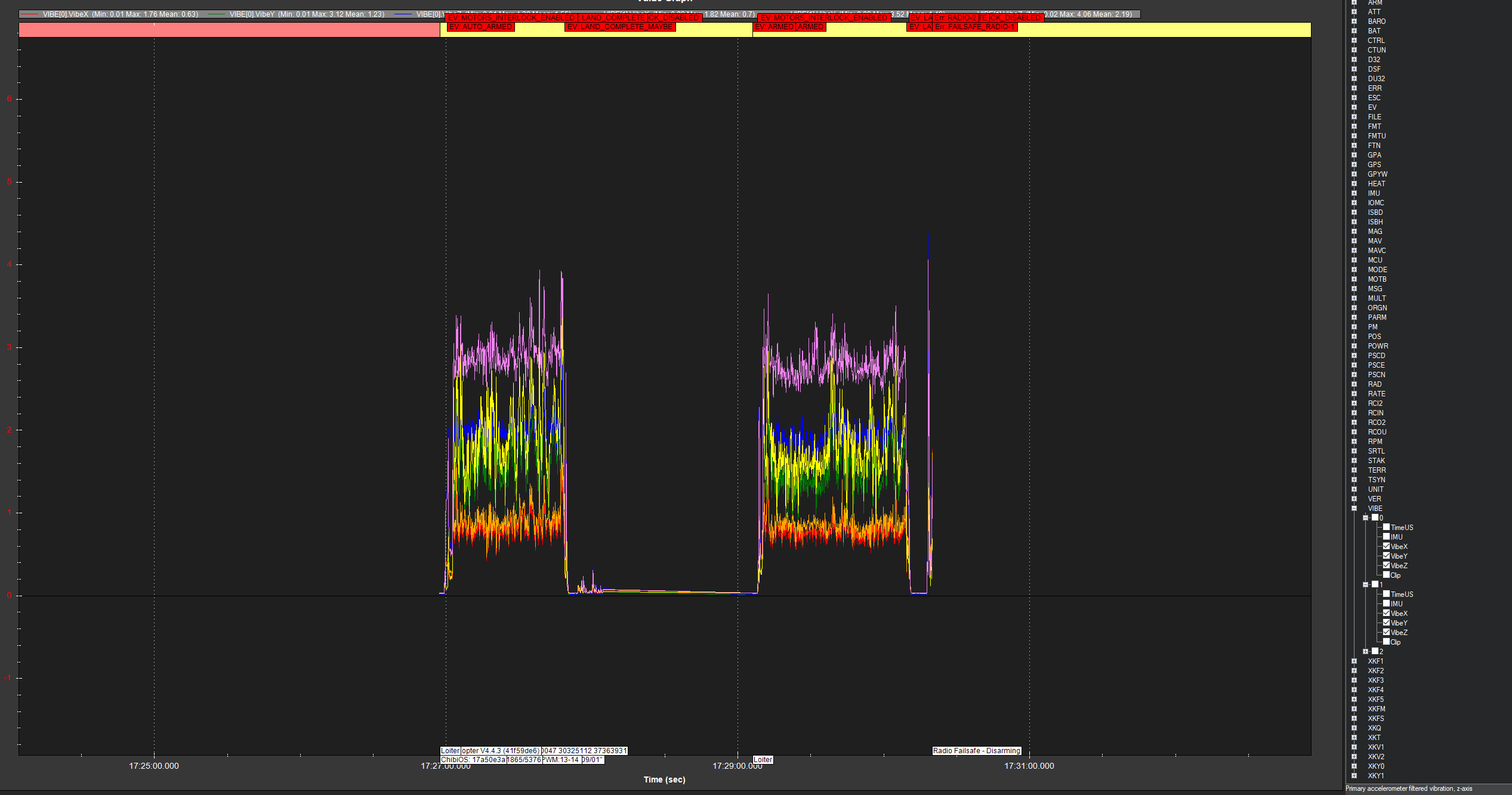
as for the pids, I have reduced them significantly from the autotune values and also there are no vibrations or oscillations in the copter which should mean they shouldn’t be high as well.
I was just trying to figure out if I have done something wrong to cause this issue.
Yes I completely understand that just adding a bigger battery doesn’t extend the flight time. I was more worried about the hot motors than the flight time.