Hi all.
I’m using ArduCopter 4.2.2
I took off the copter using Stabilize mode and switched to AltHold mode. Suddenly my drone became unstable and spun around in the air. In this test, I used a Raspberry Pi board to send GPS data to PixHawk via mavlink.
I noticed that the values of AHR2 and ATT didn’t match at the moment of the crash. Why?
Can anyone help to have a look at the log and parameters file to see what happened?
it’s true. But after this hardware problem, the engine’s pwm had to be changed to maintain stability. isn’t it?
But no attempt has been made.
I noticed that the values of AHR2 and ATT didn’t match at the moment of the crash. Why?
I didn’t find a lot in the log. You have fine vibration and RATE noise values. The position estimates going all over the place at the moment of the crash would probably be normal since the issue causes movement the copter does not expect.
What alt source do you use, the barometer or the GPS module. Have you tested the motors again after the crash?
I would try the drone without the raspberry pi to ensure that it’s no issue with the other hardware of parameter setup. Than maybe try a normal GPS module, if possible. Since the log looks quite fine, the only thing that’s unique here is the raspberry pi for gps data.
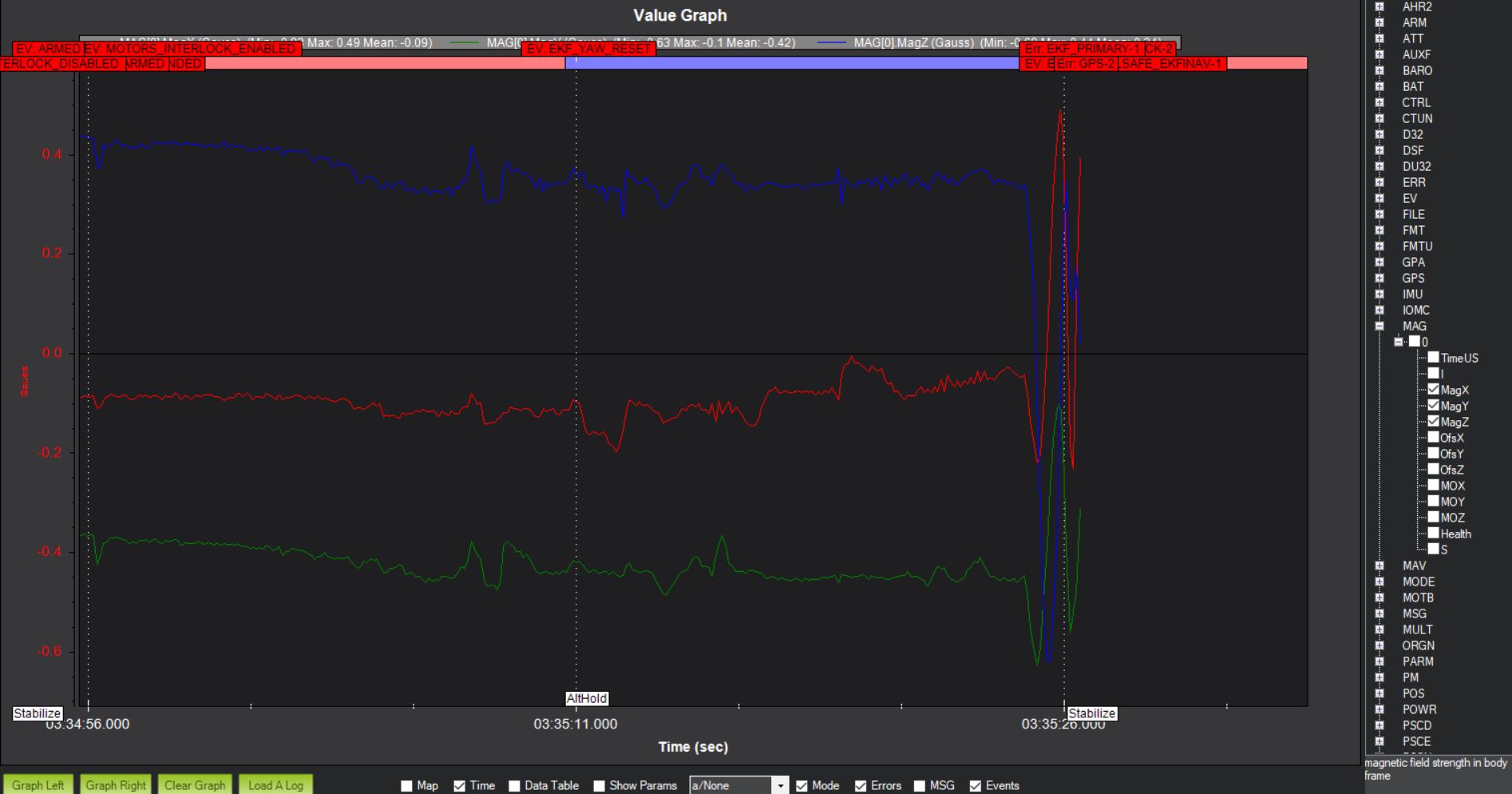
I just used the internal compass and forgot to calibrate it before flying.
PreArm_Check = 72(INS +GPS_LOCK) and I forgot to activate other items.
Could this be the cause of the crash?
Thanks for your attention.
I sent lat, long and HDOP to ardupilot via mavlink and the barometer was enable. But I don’t know which alt source was used in autopilot.
I have tested the motors and ESCs after the crash and I haven’t see any problem.
Could incorrect transmission of GPS data be the cause of the crash?
Why the values of AHR2 and ATT didn’t match at the moment of the crash? What is the difference between the two?
Thank you I really appreciate your help.
Please do not tag people asking for help, it is not the way we work here. We are a community based support and the people that helped you so far are excellent, so please be patient and appreciative of the help you are receiving.
I always use an external compass. However, in this test, because I wanted to send the GPS data to the autopilot via Mavlink, I disabled it. My question is that the inaccuracy of the compass can lead to this crash.
Thanks very much for your help.