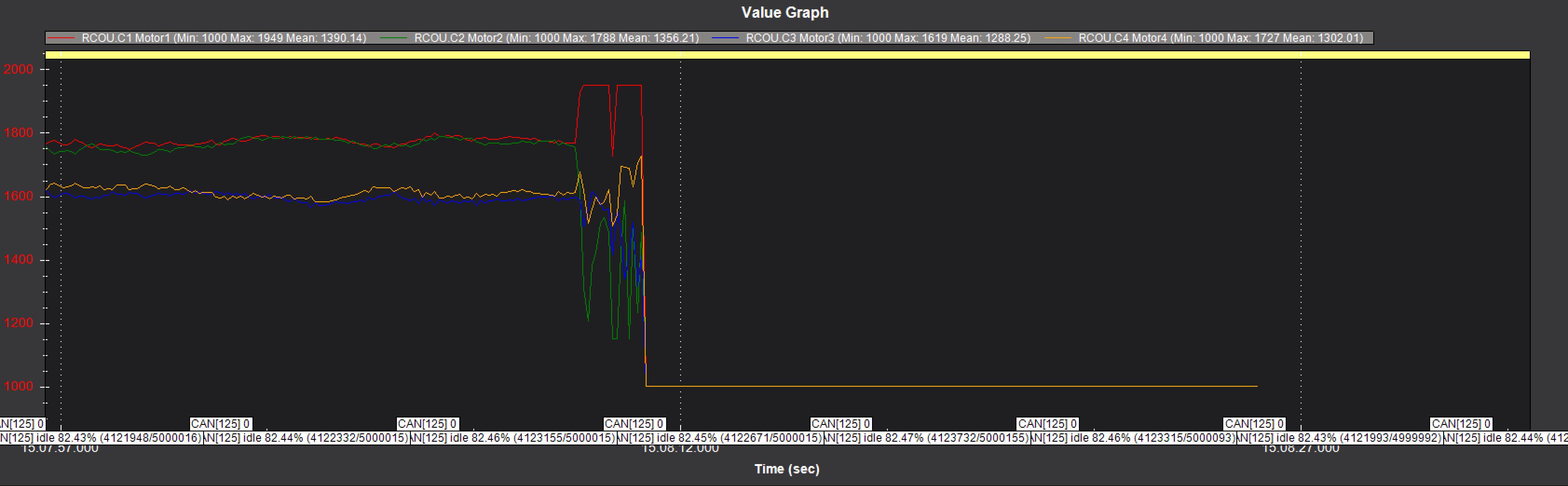
1st you have a mechanical Yaw bias with CW motors commanded higher than CCW motors. Then you had thrust loss on Motor 1, Motor 2 dropped to compensate and down it went.
Hello dear dkemxr.
What exactly you mean “you have a mechanical Yaw bias with CW motors commanded higher than CCW motors” ? Can you please explain it detaily what can be reason and how i can solve it?
Sorry but i am newcomer.
Here is log file without payload, when you look on it you see same problem with motors or it is only with payload?
This is usually caused by the motor mounts or arms being twisted (motors not vertical). The Clockwise motors are bening commanded higher than the CCW motors as a result.
I posted that graph so you can reproduce it. Graph the RCOUT’s for the 4 motors in the log of no payload. What do you see?
That’s not usually apparent from the log. Motor, ESC, prop, connection failure. Could be any of them. Some may claim a desync but that’s no easier to prove.
Is any way, how i can identificate where is problem? Because i fight with this shit one year. I change esc from Hobbywing Skywalker controlled by PWM to APD 80F3x ESCs controlled by Dshot. What i can do in this case?
It’s unlikely to be an issue with the APD ESCs as far as I know.
As per the instructions for Compass/Motor calibration, I would:
Disconnect your props, flip them over and rotate them one position around the frame. In this configuration they should push the copter down into the ground when the throttle is raised
Secure the copter so that it does not move
Keep people and objects away
Then use MissionPlanner motor test to run all or individual motors until you see a problem.