Home
Blog
Stores
Docs
Copter
Plane
Rover
Sub
ArduPilot Discourse
Copter can't maintain altitude
ArduCopter
Copter 4.3
arducopter
angleman
(Lu)
June 28, 2024, 4:04am
1
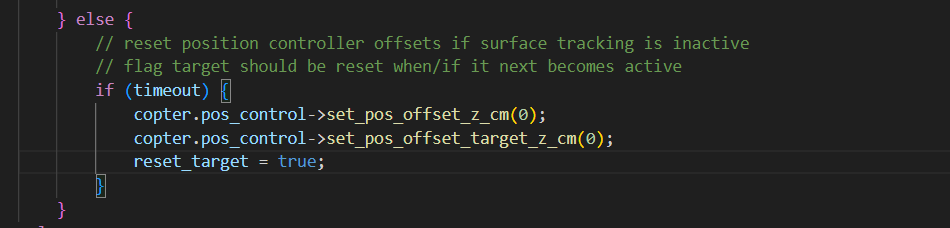
surftmode
950×228 10.3 KB
Setting surftmode to 0 will always enter the timeout function, althold mode and poshold mode will not maintain the height, I don’t know if this is a logical error or something else, but it affects the experience of using