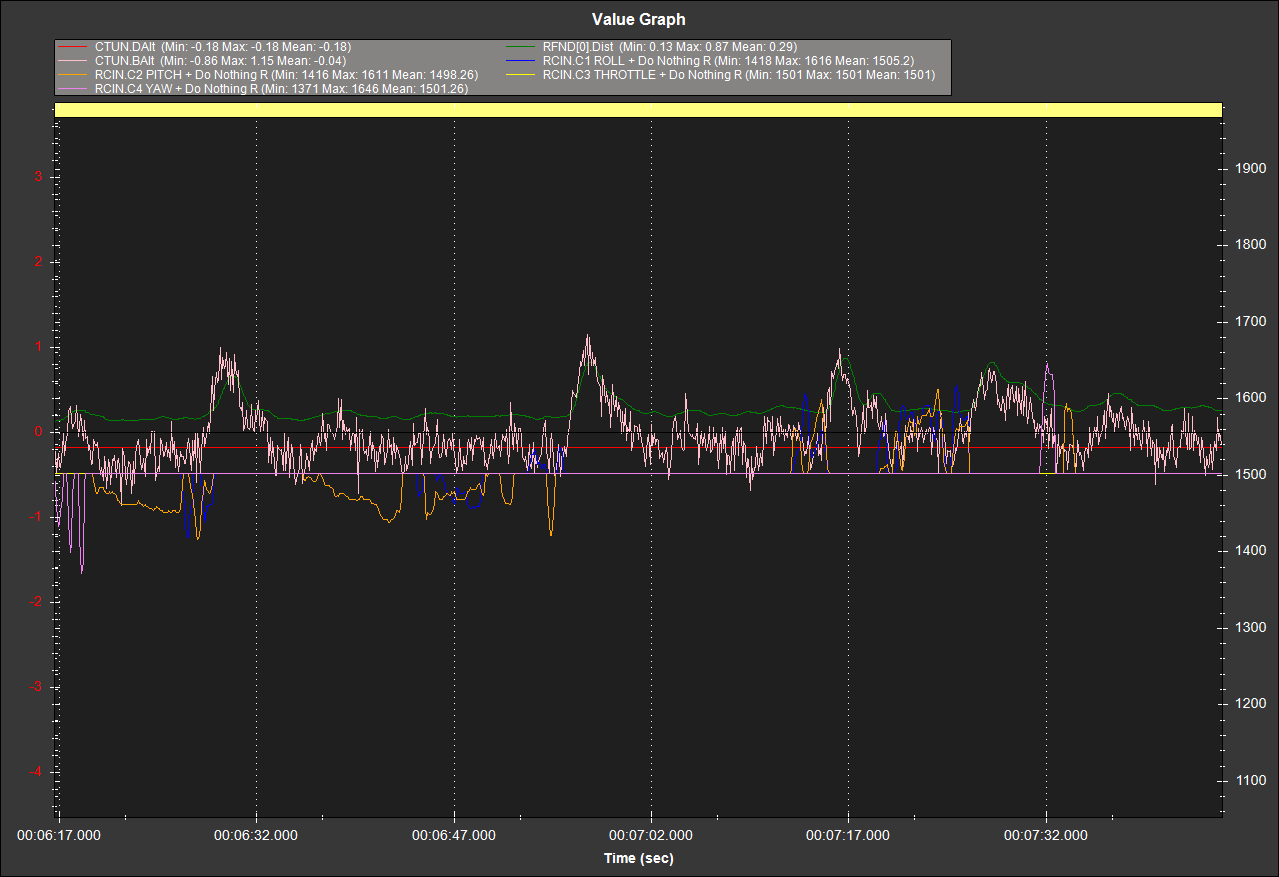
I just migrated from 4.5.3 to 4.5.7. I noticed that 4.5.7 occasionally causes the drone to auto-climb to some height and auto-descend without the pilot moving the throttle stick indoors when the pilot maneuvers (pitch/roll) near the ground.
I do not remember observing this in 4.5.3.
What could be the cause?
CubeOrange
Hereflow
Lidar LW20/C
log.

[Edit]
If I change the posz to lidar, the result seems much better and haven’t yet encounter the auto climb navigating at close to ground level.
EK3_SRC1_POSZ,1
EK3_SRC2_POSXY,0
EK3_SRC2_POSZ,2 #lidar
EK3_SRC2_VELXY,5
EK3_SRC2_VELZ,0
EK3_SRC2_YAW,1
EK3_SRC3_POSZ,1