Copter-4.5.7 has been released as the stable/official firmware for multicopters and traditional helicopters and will be available for installation using MP or QGC within the next few hours. Alternatively the .apj file can be directly downloaded from firmware.ardupilot.org.
The changes compared with 4.5.6 are in the ReleaseNotes and copied below.
Bug fixes and minor enhancements
VUAV-V7pro support
CUAV-7-Nano correction for LEDs and battery volt and current scaling
DroneCAN deadlock and saturation of CAN bus fixed
DroneCAN DNA server init fix (caused logging issues and spam on bus)
F4 boards with inverter support correctly uninvert RX/TX
Nanoradar M72 radar driver fix for object avoidance path planning
RC support for latest version of GHST
TradHeli DDVP tail rotor pitch actuator fixed
ROS2/DDS and other developer focused enhancements
AP quaternions normalised for ROS2 to avoid warnings
Dependencies fixed for easier installation
ROS2 SITL launch file enhancements including displaying console and map
ROS_DOMAIN_ID param added to support multiple vehicles or instances of ROS2
Python 3.12 support
Please note that the beta included the change below but it is not included in this stable release after some issues were reported that need more investigation
Septentrio GPS sat count correctly drops to zero when 255 received ← removed
Thanks as always to our beta testers for their feedback!
Hi @rmackay9
Was exploring functionality of DO_LAND_START on ArduCoptor.
Was using 4.7.0 Latest dev on MP. SITL Scenario.
After DO_LAND_START(WP7) & after next WP8, if GCS failsafe engages at WP10 aircraft continues to WP 11 stating condition in messages " landing sequence active "
When checking with the latest stable release 4.5.7
After DO_LAND_START(WP7) & after next WP8, if GCS failsafe engages at WP10 the aircraft restarts the Landing sequence again, aircraft continues to WP 8.
This change came in as part of the support for the new DO_RETURN_PATH_START waypoint. We won’t be backporting to 4.5, but it is supported on 4.6.
Were still working on the documentation for that feature, but it sounds like it might be a better fit for you than DO_LAND_START. This is the demo I did when we were developing the functionality. Note that I refer to the waypoint as DO_LAND_REJOIN, before it was merged we changed the name to DO_RETURN_PATH_START, the functionality is the same.
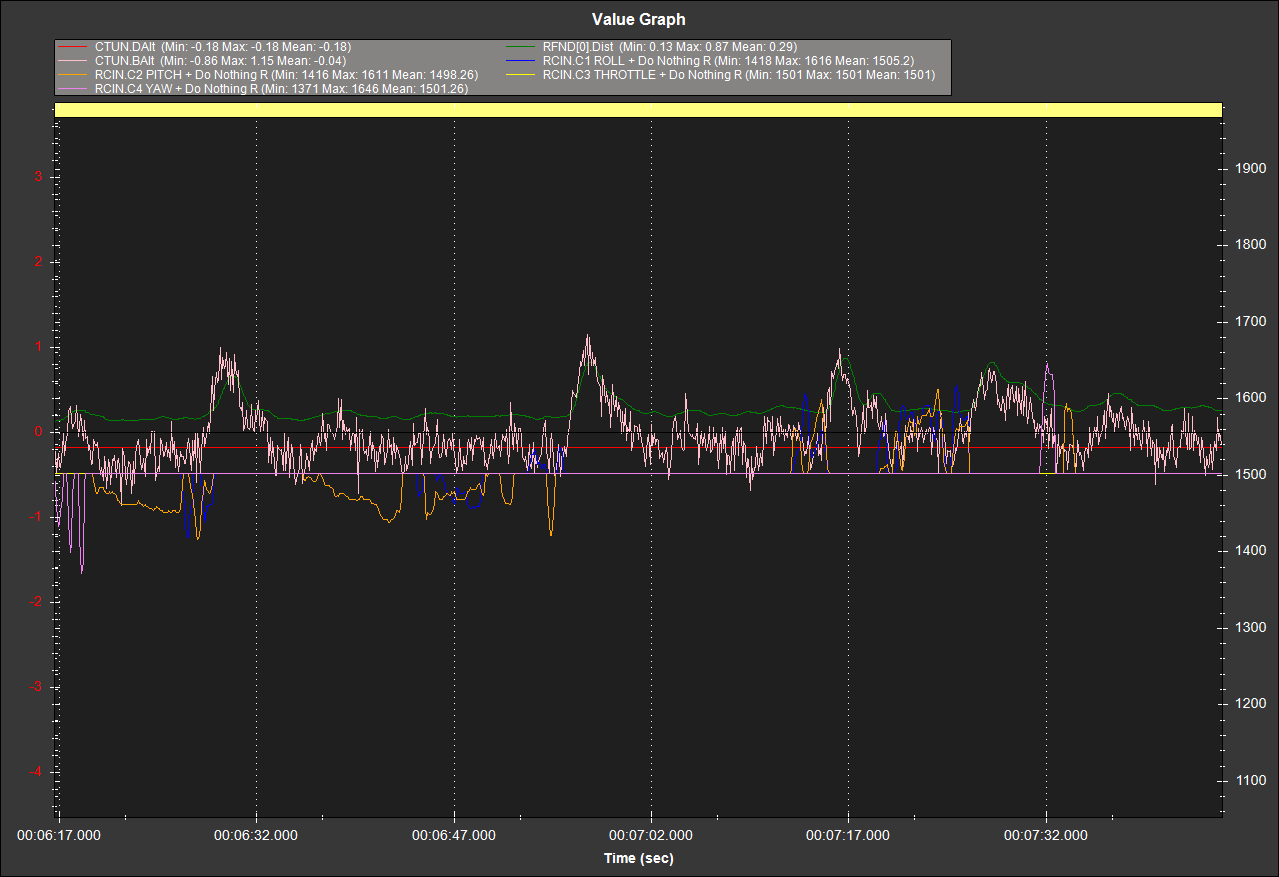
I just migrated from 4.5.3 to 4.5.7. I noticed that 4.5.7 occasionally causes the drone to auto-climb to some height and auto-descend without the pilot moving the throttle stick indoors when the pilot maneuvers (pitch/roll) near the ground.
I do not remember observing this in 4.5.3.
What could be the cause?