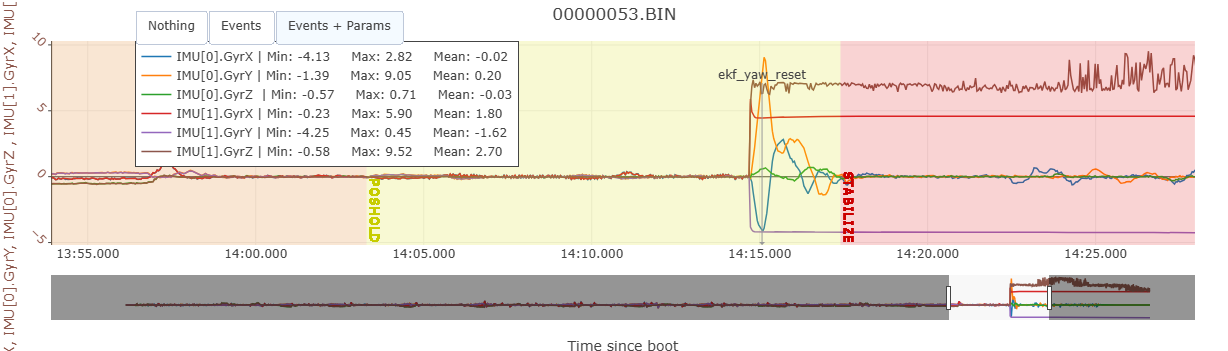
Heres something too looks like imu2 values went to max and stayed there. I wonder if its that fragile fpc connector or bad gyro.
Are you running a cube black or pixhawk 2.0 by chance?