The drone is a DJI S1000, Octocopter, running the stock motors & ESCs. This was the third flight of the day, first flight had been battery only, 2nd flight had been a mock payload and 3rd flight was with an actual payload of < 3 kg.
The drone had been flying well all day and other than this “flip” it had not shown any issues. The drone was flying high enough that it finished the flip and thankfully regained control. I switched out of position hold into stabilize mode and was able to land, I did not fly the drone anymore.
I suspect some kind of IMU, GPS, or compass glitch, but I’ve looked at the logs and can’t figure out what the issue may be. I did notice that I gave a small yaw input the moment the glitch and the flip happened, but other than that, I cannot tell what may have caused it.
Can someone please look at the bin file and let me know if they see anything that is misconfigured or could have caused the issue? Thanks in advance!
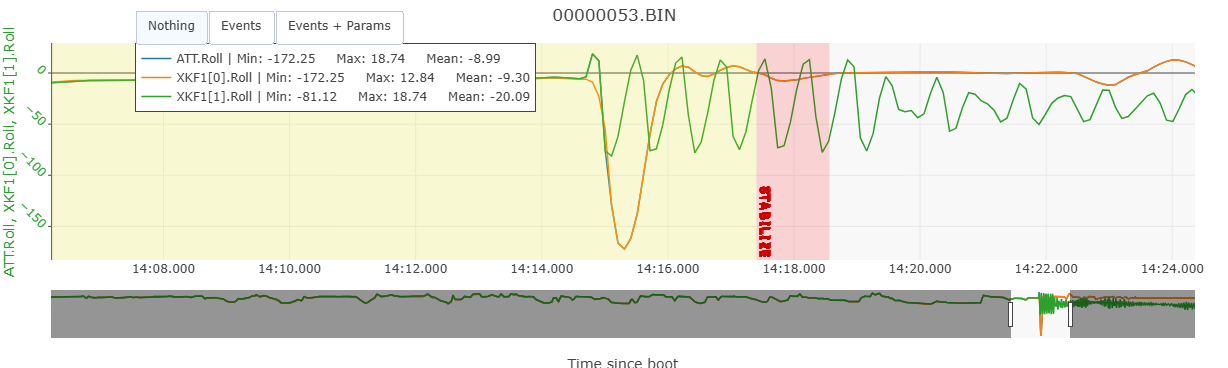
I did notice when comparing the estimators, that XKF1[1].Roll shows a mismatch in the estimate, but I don’t know enough to make sense of this data point. Could this be the cause of the issue and what to do about it?
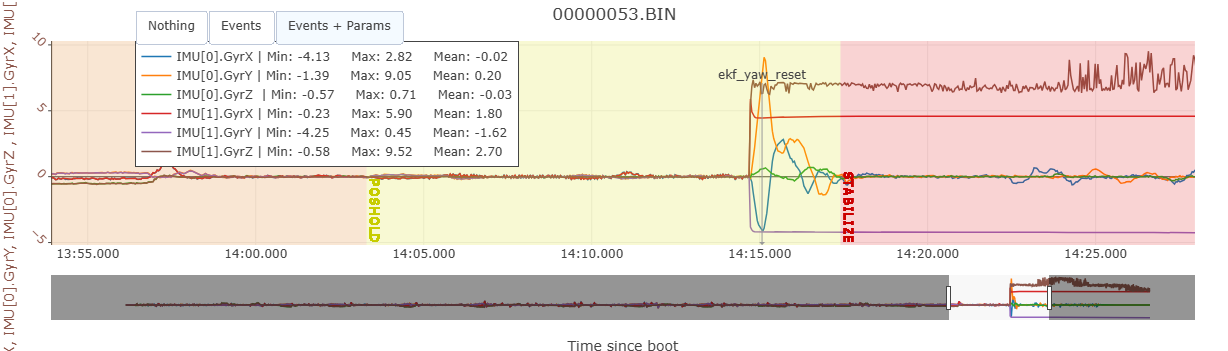
Dont know too much about reading these logs however I noticed that ekf yaw reset was triggered right as it its dropping 14:15. Seems like lane2 had nonstop issues after that point. Im guessing ekf lane switch and stabilize mode saved you.
Google has everyone saying bad compass calibration/interference during high current draw. I did see some input on rcch4 right as this was occuring but youve been pulling way higher current previously I bet.
Hoping others can weigh in on the compas and mag readings as I got a build coming too!
Its a bad IMU, specifically the gyroscope on IMU1. The only indication in the events log is ekf yaw reset.
I wonder if the gyro mems device got stuck, the IC controller crashed, or bad power. Probably power cycling the device and its back to normal. Regardless id get a better flight controller. Its an intresting failure that all 3 axis on the gyro froze at max yet accelerometer data of IMU1 was still good. Very lucky that FC could recover and you had altitiude.
Did you configure the copter with methodic configurator?
Doesnt look like you are logging much?
What flight controller are you using? I see that you are using Pixhawk 2.4.8, some like these and others don’t. My choice is if I am flying something of that size and cost, invest in a cube orange + or holybro…
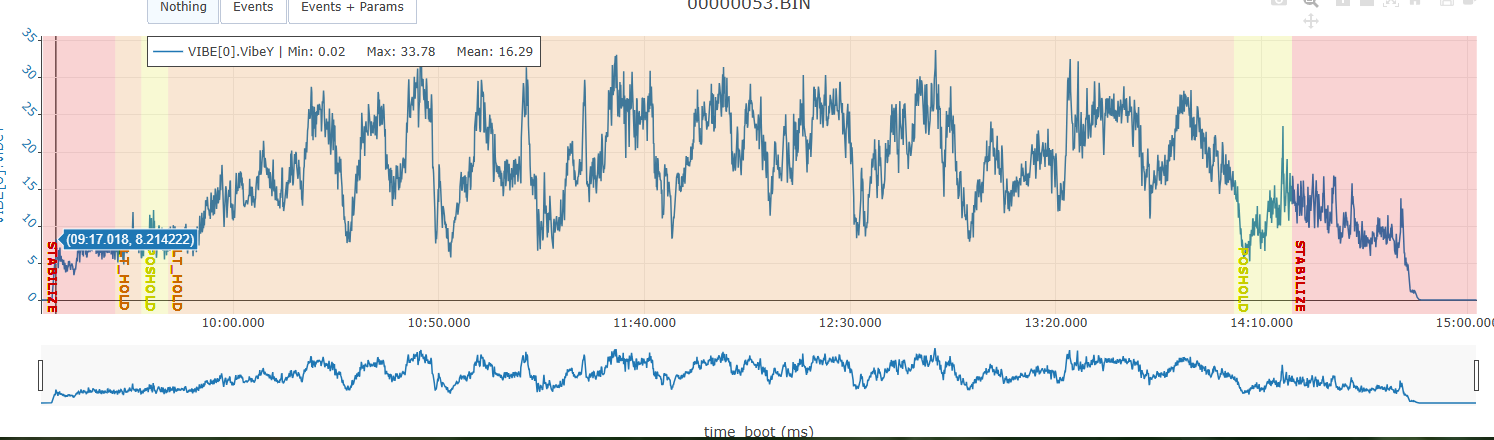
Y axis vibrations are really high…
Thank you all for your inputs. I did end up replacing the Pixhawk hardware and wrote it off as a bad IMU. Unfortunately, the client requested that we switch to PX4 after this incident, so I cannot report more on the issue.
It’s complicated, but a combination of both. They actually have a module running on a companion computer that they previously had working on PX4. It uses Mavlink commands, and they had first been okay with the drones using Ardupilot, but after the issues, they just asked to go back to PX4.