Hi,
I have a crash today with a quadcopter on 4.5 during autontune.
Here are the log if you are interested.
550mm quadcopter, 15’’ prop, liion 6S 80000Mah, pixhawk4, around 2.5Kg…
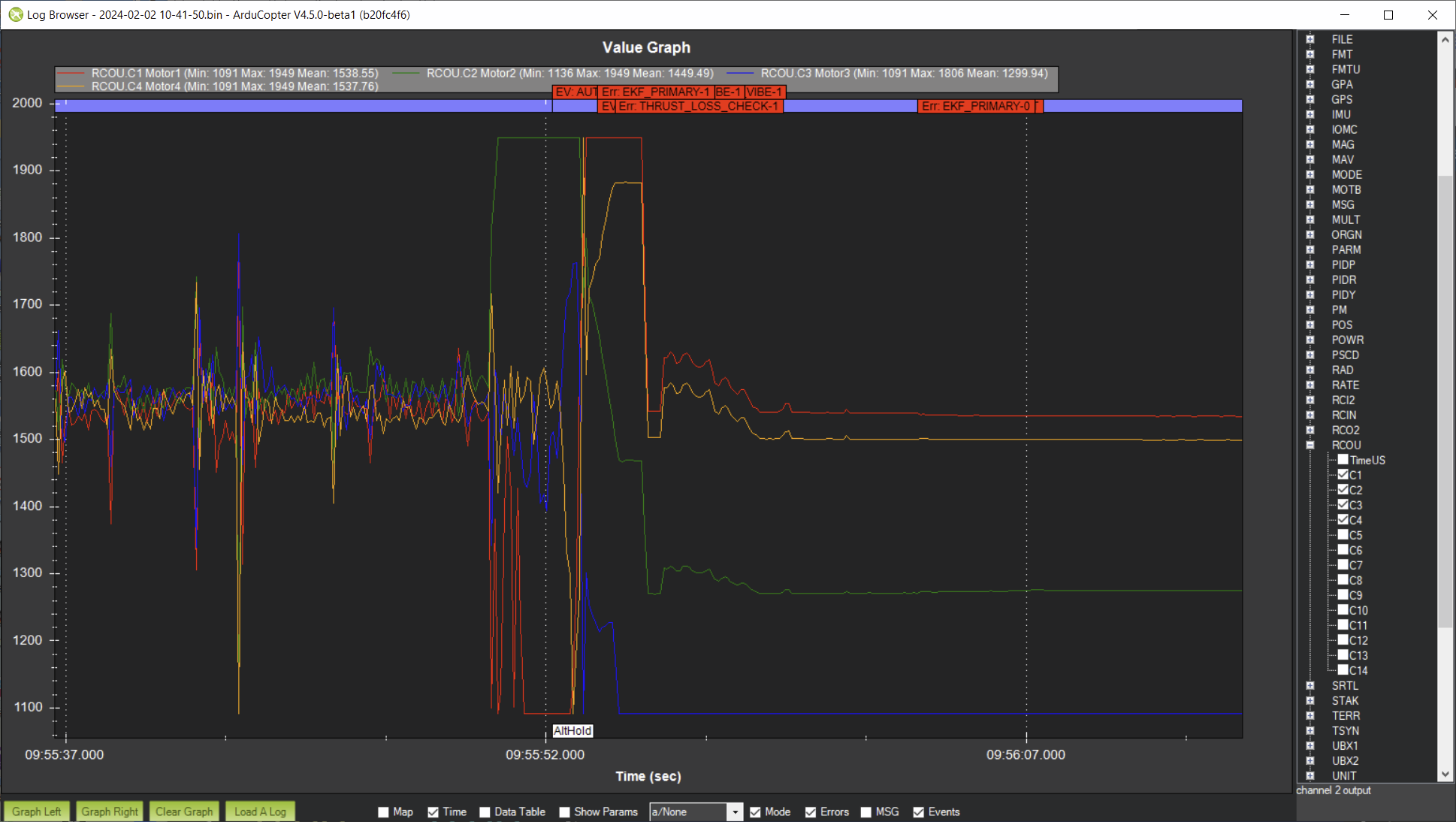
I was doing autotune, the drone did roll autotune for about 10min everyting was going well, then goes to pitch autotune was going well for 5min then sudently he goes in spiral down to the ground.
You lost motor 2. Likely a desync if it still works afterwards. Check the ESC and motor carefully for wiring or shorting issues and if all looks good then you need to suspect your ESCs
When configuring the ESCs with the provided 07_esc.param file there are parameters in there that mitigate the de-sync probability. Have you read that? Have you used it?
I have the same problem using autotune (crash…). Now I tune my cube-orange step-by-step using the guide from amilcarlucas. There are tons of useful information there!!!
I think that Ryan (maintainer of AP’s ROS libraries) will provide more details on the ROS2/DDS changes in the near future. Until then our ROS wiki pages have some setup information.
No, I didn’t say I’ve solved all the issues. But by following this guide step by step, I’m gaining a deeper understanding of how Ardupilot works. Today, I went flying and got a log file to analyze vibrations and fine-tune the filters.