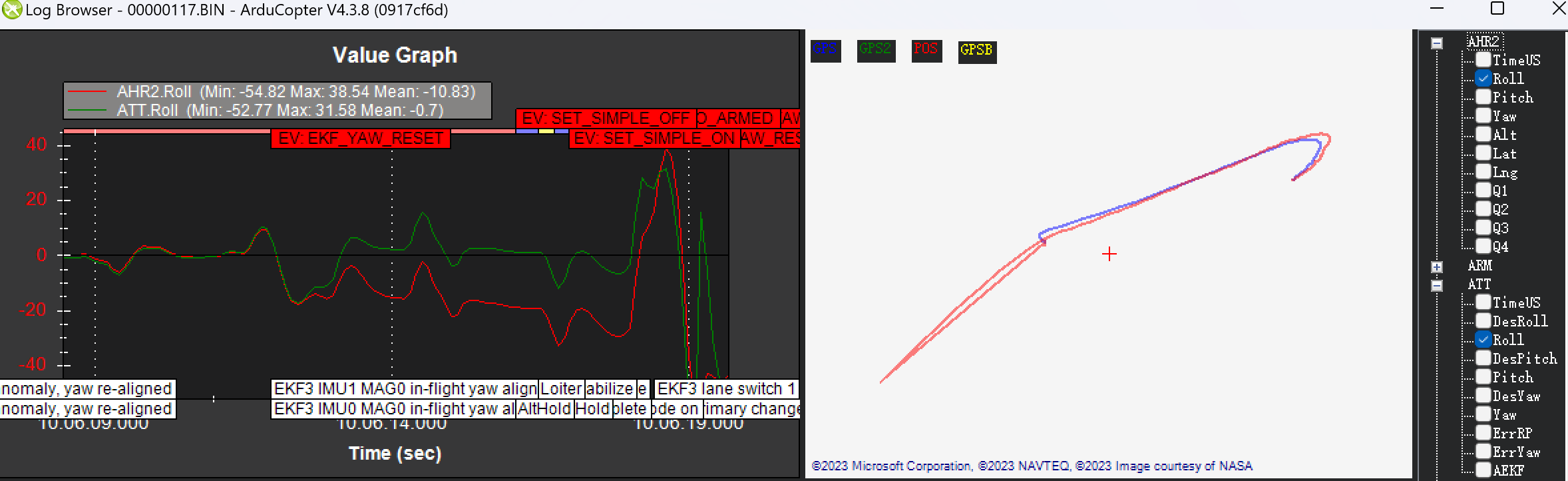
With copter 4.3.8 firmware, after takeoff, the attitude is uncontrolled, gradually flying away, and then hitting a tree. Can help me analyze the reason. This is the log file.
00000117.BIN (841.2 KB)
This craft shouldn’t have been flying at all on default parameters. Not even the initial Tune Parameters were set which are pre 1st flight settings. Update to current Stable, set those parameters and then start the tuning process.