Copter-4.3.4 has been released as the stable version and can be installed using MP, QGC or it can be directly downloaded from firmware.ardupilot.org.
The changes vs 4.3.3 are in the Release Notes and copied below
AutoPilot specific enhancements
a) CubeOrangePlusBG support
b) Foxeer ReaperF745 supports external compass
c) MambaH743v4 supports VTX power
Precision landing option to resume tracking target after pilot repositioning
Lua script PWMSource feature disabled due to possible watchdog (will be back in 4.4.x)
Bug fixes
a) Arming check fix for terrain following with rangefinder (failed if terrain db was disabled)
b) Arming check fix if BARO_FIELD_ELEV set
c) Compass calibration diagonals set to 1,1,1 if incorrectly set to 0,0,0
d) FFT notch tune feature disabled (will be re-released in 4.4)
e) Gimbal’s yaw feed-forward set to zero when landed (affects Gremsy gimbals)
f) IOMCU double reset and safety disable fix
g) Logging fix for duplicate format messages
h) OpenDroneId sets emergency status on crash or chute deploy
i) Peripheral firmware updates using MAVCAN fixed
j) RC protocol cannot be changed once detected on boards with IOMCU
k) Surface tracking uses filtered and corrected rangefinder values
Thanks very much to these who assisted in beta testing. We’re finding that it’s difficult to get much feedback for the point releases so we really appreciate the help!
Hello
Using this firmware for my copter. And meet probrem that wasn’t early.
Don’t execute failsafe when lost telemetry. Power off my ground station when flying and copter doesn’t change to RTL mode and only freeze.
Configuration Cube:
FS_GCS_ENABLE = 1
FS_OPTIONS = 0
I recently posted a query on the forums about my quad behaving erratically during a pre-programmed autonomous flight from a python script. dkemxr (Dave) was kind enough to look at the log from that flight and he told me it looked like I had not carried out any Initial Parameter Setup or tuning. This was and still is a mystery to me but anyway I have started again and going through the initial setup and test flights. My problem is that either it has been so long since I carried out the initial setup that I have forgot how I got my quad setup and flying reasonably well or some of the parameters have changed, or both.
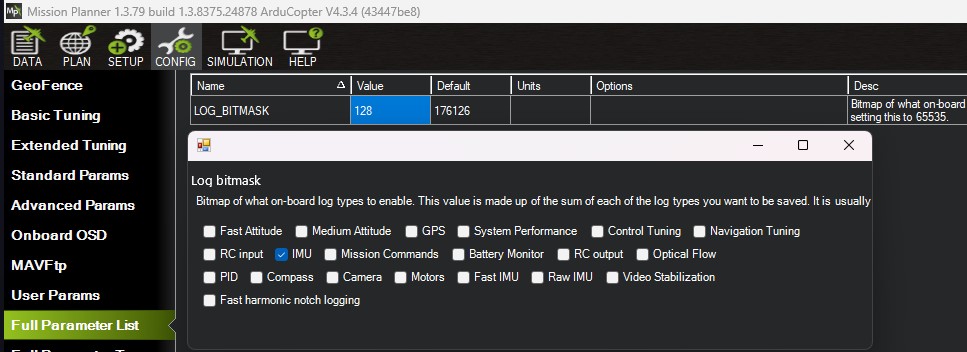
I am following your video “First Flight with Copter” and I remember doing so previously. Basically I am wondering about the log bitmask. In your video (and I remember setting this before) you say to set this to Default & IMU. The problem I have is I can’t seem to find this in V4.3.4. The descriptor in the parameters list suggests setting this to bitmask 65535. Is this the equivalent of the previous Default & IMU, which was bitmask 958 previously or do I need to change this to another value?
Thanks,
John
Thanks again for replying.
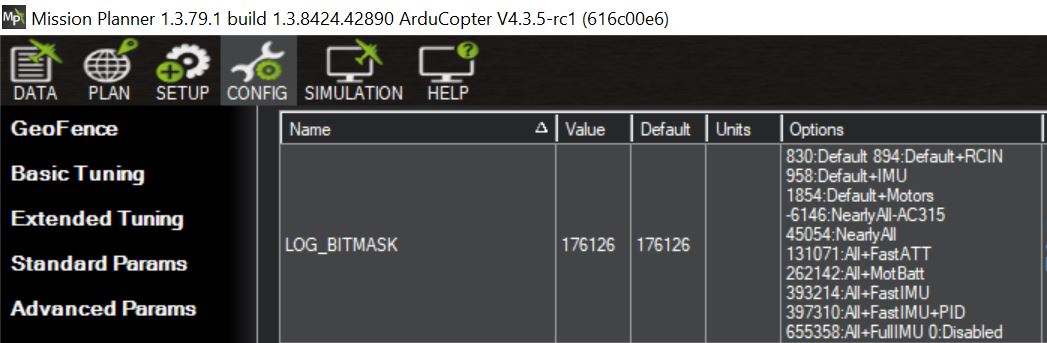
I’m a bit confused by your reply. You say 176126 is default and while I have the same default value in my params list (screen below), I don’t have the options listed as you do, and your options list has 830 as Default and 958 as Default + IMU.
Am I missing something important here? Would these values differ depending on FC and version of firmware used, or is Default + IMU always 958?
Basically I want to have Default + IMU set so that I can follow Randy’s “first flight checks” video which I remember doing previously so I can start to get my quad flying as it was before I lost my setup, although I don’t know when I’ll get back out, the weather here in Scotland is more unsettled than it usually is!
No. Like many Youtube videos they can show their age fairly quickly. The default value shown in Mission Planner today will give you all the metrics you need for 1st flight checks.
Yes, at first time testing copter and GCS failsafe.
Today, this problem not actual for current Copter-4.3.4 released because had firmware on FC 4.3.3. And I made wrong when wrote below release 4.3.4
Sorry
hi every one, sorry to bother, did anyone knows the MNT_RC_IN_TILT parameter change into which parameter in arducopter V4.3.4? I can’t find the parameter in the full parameter list.
It’s here on the wiki but in any case we’ve moved that parameter to be part of RCx_OPTION. So for tilt (aka pitch) control set RCx_OPTION = 213 (Mount1 Pitch) where “x” is the RC input channel number that you want to use to control the gimbal’s tilt/pitch.