Copter-4.3.0-beta4 has been released for beta testing and can be installed using MP or QGC’s beta firmwares link or it can be downloaded directly from firmware.ardupilot.org.
The changes vs -beta3 are in the ReleaseNotes and copied below.
Scripting supports implementing AUX functions
Bug fixes
a) BMI085 accel scaling fixed
b) Build with gcc 11.3 fixed (developer only)
c) EKF3 alt discrepancy if GPS or baro alt changed soon after startup fixed
d) Harmonic Notch and ESC telem fix when motor outputs are non-contiguous
e) NMEA GPS’s KSXT message parsing fixed (affected position accuracy)
f) Scripting random number generator fix
We expect this to be the final beta before 4.3.0 becomes the stable release so all testing and feedback is very much appreciated!
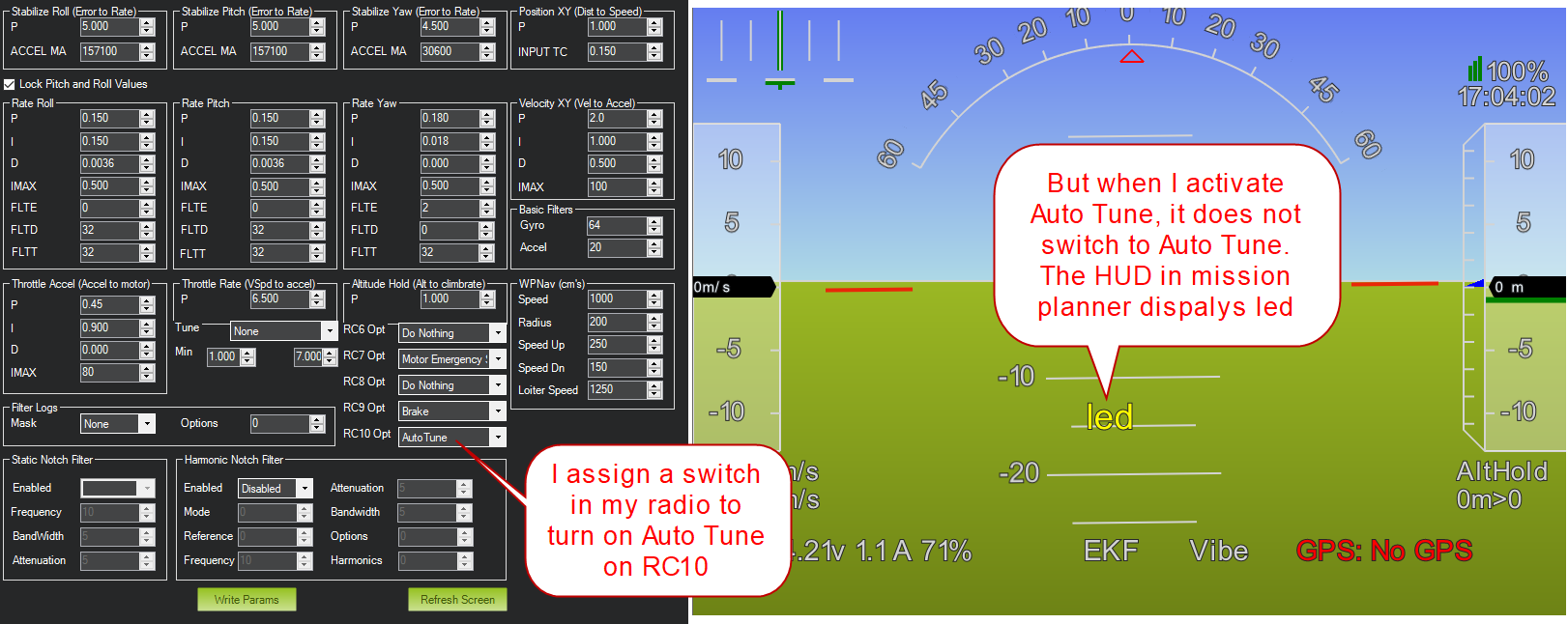
Can somebody take a look at the Auto Tune functionality for the firmware of Kakute H7 flight controller. When I switch to Auto Tune, the copter does not enter Auto Tune and mission planner displays “LED”. Please refer to screen shot.
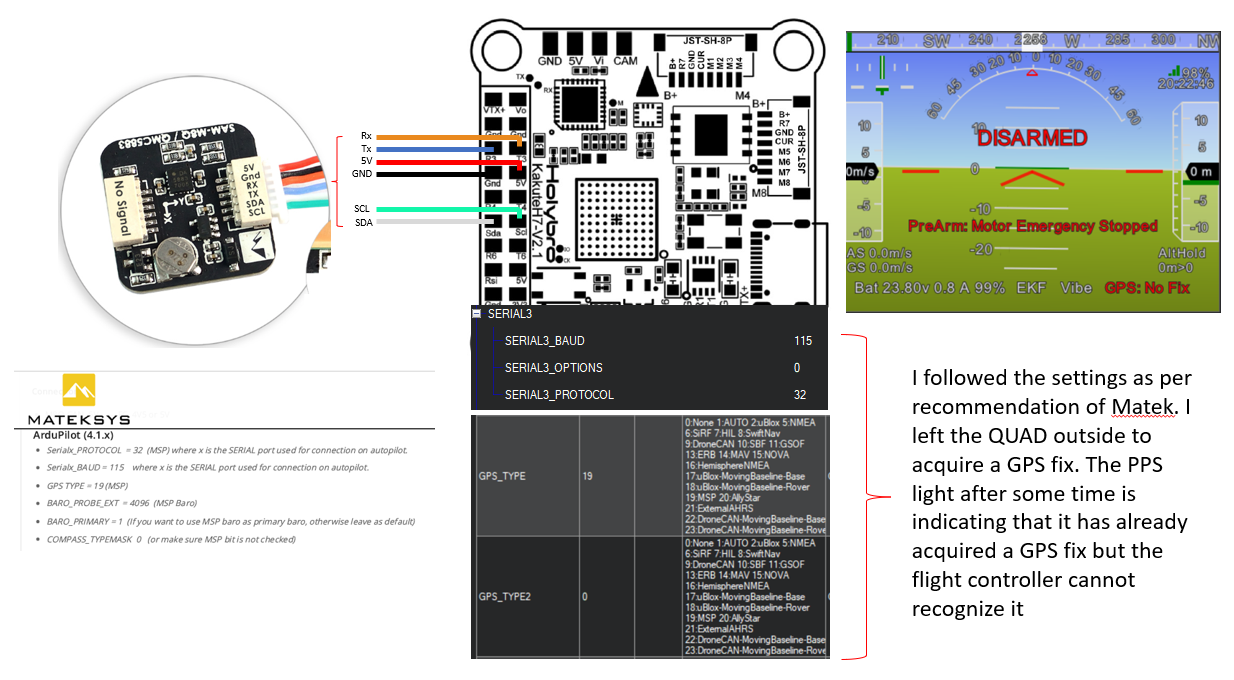
I have also activated the GPS but even if the PPS LED of the GPS idicates that it has aquired a GPS Fix, the fligt controller does not. I have provided the wiring diagram and the parameter settings of the GPS unit according to Matek. Am I missing another parameter so that the flight controller will recognize the GPS Fix? Please help.
I’ve encountered this before. There was two problems on that drone.
First it had two channels dedicated to enable autotune, although I believe that is a separate error message so might not be your issue.
The other thing was that I needed to increase the dead-zone of one of the stick inputs.
If arducopter detects a stick input other than centered sticks, it won’t start autotune or paus it in the air.
What you should do is to perform the radio calibration to ensure that arducopter knows where middle stick is. Second to do is to increase the dead-zone for that input. The simplest to do is to increase the dead-zone of all stick inputs by a little bit. Maybe increase with 10 PWM and try again.
When I bought a flight controller, I did not know the use of the SD card so I did not care that time and decided to buy the Kakute H7 V2 flight controller whick does not have an SD card slot. When I was going deeper into the functionalities of Arducopter, I realized that without the SD card, I am not able to run LUA scripts. Is there another way to uplaod and run a LUA script without the SD Card. May be a dumb question but experts might have some ways to do it.
If its not possible, are there H7 flight controllers with the same form factor in the market with an SD card?
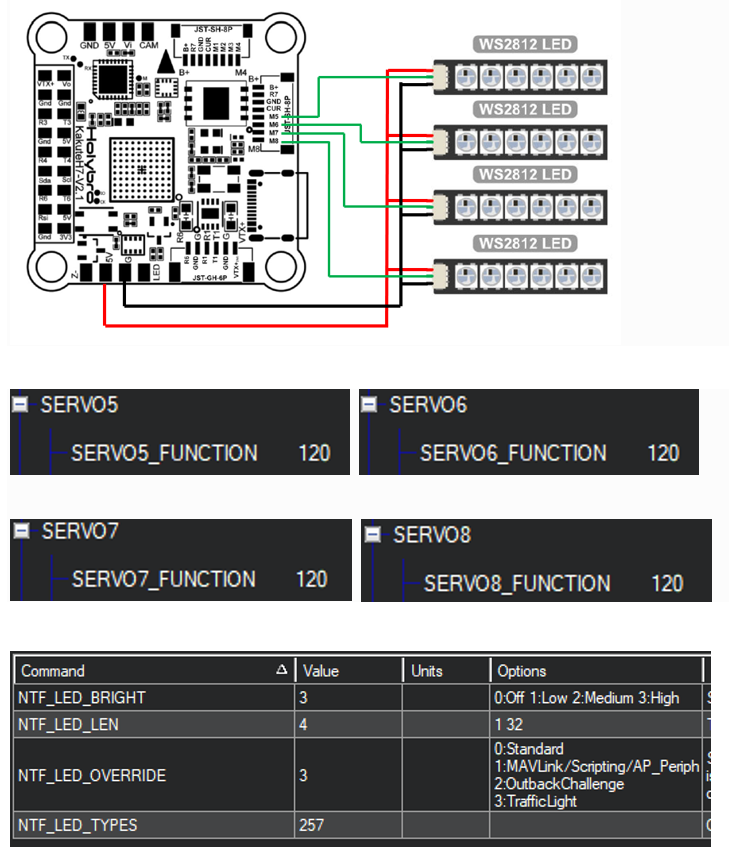
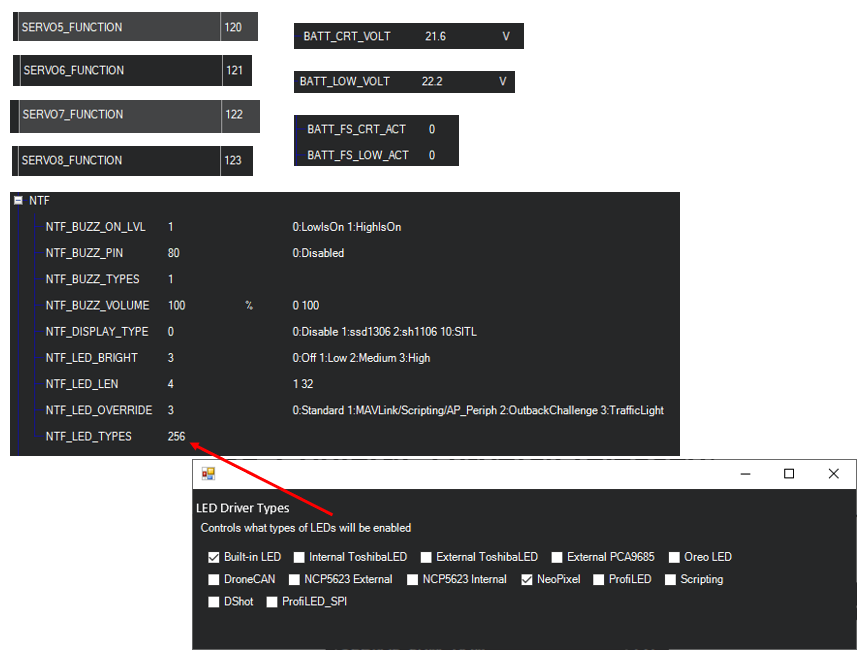
The reason I am after using LUA script is I have connected a WS2812 LED to the FC. The leds indicate if the emergency switch is ON/OFF, and the quad is ARMED/DISARMED. But the LED’s does not indicate when the LiPo low voltage setting is reached. So I am still relying on a timer to end my flight. It would be nice if those LED’s can indicate low voltage and critical alarms. Or am I missing a parameter to accomplish this? The only settings of the LED I found are
This is how I connected them. Each LEd is on each arm of teh QUAD. I was hoping I can use the LUA script as well such that the LED change color depending on how the quad is banking left/right/back/front. But since my FC does not have an SD Card, then this is not possilbe.
I don’t think that the fix for the do-change-speed will make it into 4.3.0 (stable) but it will surely be fixed in a follow up minor release (e.g. 4.3.1 or 4.3.2)
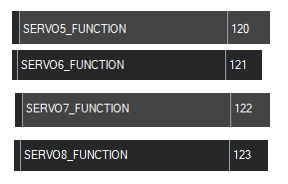
Thanks for noticing that. I changed my parameter settings to
I guess this is the correct settings. But the LED’s still does not indicate when the LiPo low voltage setting is reached. The leds only indicate if the emergency switch is ON/OFF, and the quad is ARMED/DISARMED. I have rebooted the board after thischange.
Do you have any other recommendation to make the LED’s indicate low battery voltage?
The Kakute H7 flight controller does not have an SD card so I am not able to run LUA Script. I tried to find the parameter AP_Notify but it does not exist in the build of this flight controller. Does that mean that there is no support on low voltage alarm on the LED of this flight controller?
If the external LEDs are replicating what the build in LED would do (and that should be the case) then the colour will change to yellow when there is a battery failsafe.
Have you got a complete param file?
With those settings, the LED’s does not change to yellow when the battery failsafe (Low or Critical) voltage is reached . I’m pretty sure I’m missing somehting but I cannot figure it out. Any help will be appreciated.