I’m not sure, I started flying the drone when the betas came out, after several months of inactivity. Anyway, I will install the latest stable firmware to do several tests on it and see the behavior in flight.
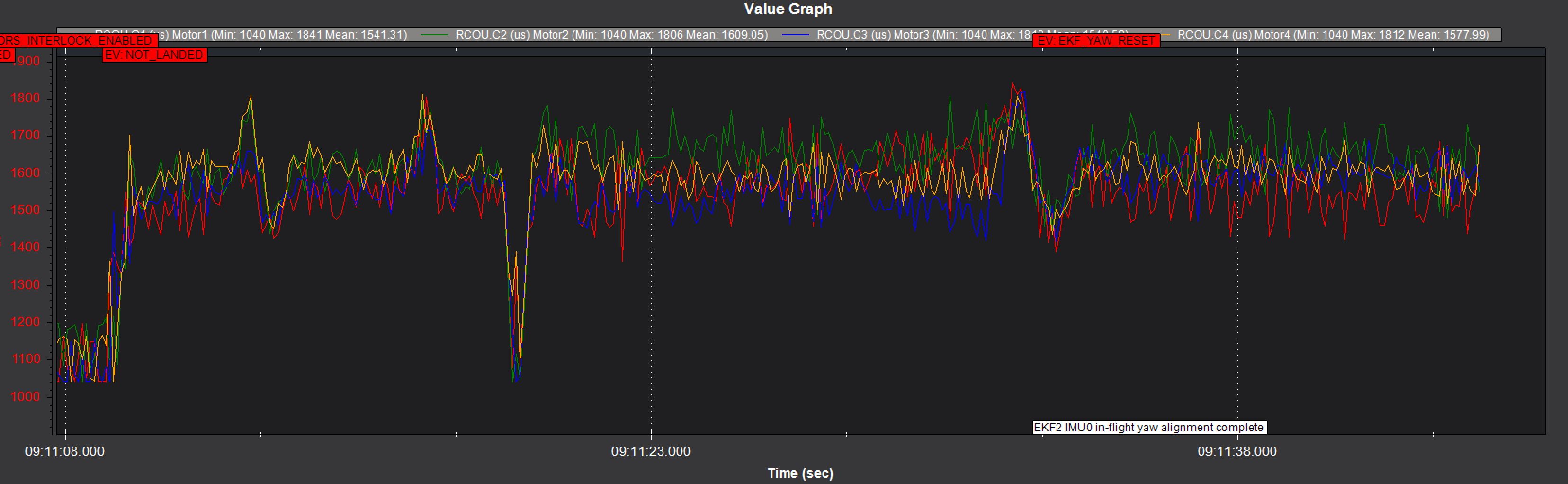
Another thing, I’m analyzing registers after this one that I loaded, and I see the outputs at 1600 us and MOT_THST_HOVER at 0.437. Are these values within normal?
log_2_2020-9-24-09-11-44.bin (964 KB)
No, but it’s typically flyable. But under aggressive maneuvering you could still get thrust loss errors and lack of stability.
So, as I said flyable and craft like a camera drone flying slowly without high wind this is fine. Under aggressive flying under poor conditions though I would want more thrust/weight.
1 Like
Thanks for the help, I will make several changes to improve the thrust/weight.
And get current logged if you can.
I doubt this has anything to do with 4.3.0-beta3.
In this case I don’t know what is happening, I have an mRo Hall Sens Power Module ACSP7, configured as recommended by the manufacturer and I can’t get the correct current reading.
I would consider put a drop of oil into the motor bearings. I have a 30 ml Scorpion Bottle it says: Mil-C-81309E, Type II. Lubricant Made in USA. If you have oiled the bearings forget about this.
1 Like
Not a bad idea for motors that have run for 6yrs.
@winstonsaz, I’ve said it before but that’s a nice looking little vehicle…
Thank you very much Randy, It is a design inspired by the entire Ardupilot community.
Thanks FRED_GOEDDERT, I haven’t considered putting oil in the motor bearings, never have but will try.