@Yuri_Rage maybe try concentrate on the issue and do not be arrogant also listen my arguments to understand the problem. That’s not my interest to write several times how the problem occurs. I am just helping you to resolve problem I believe exist. You get the flight log with the proof that problem appears. I had many AUTO flights with incorrect speed because of the problem with DO_CHANGE_SPEED. With every new version of arducopter from 4.07 I am waiting for fix of this problem. In my opinion Mission Planner is not related with the problem. If the waypoints are ok Mission Planner can’t improve anything. Or maybe I am wrong and there is additional information in flight plan file from Mission Planner not visible in Waypoints list ? Or maybe waypoints are written differently in new beta version of Mission Planner ?
Flight path is the same for 3 flights and in first flight problem is visible (the forward speed is 18 km/h) in second and third flight with manual changes to waypoints (adding empty waypoint or changing the speed to full numbers) the speed is ok.
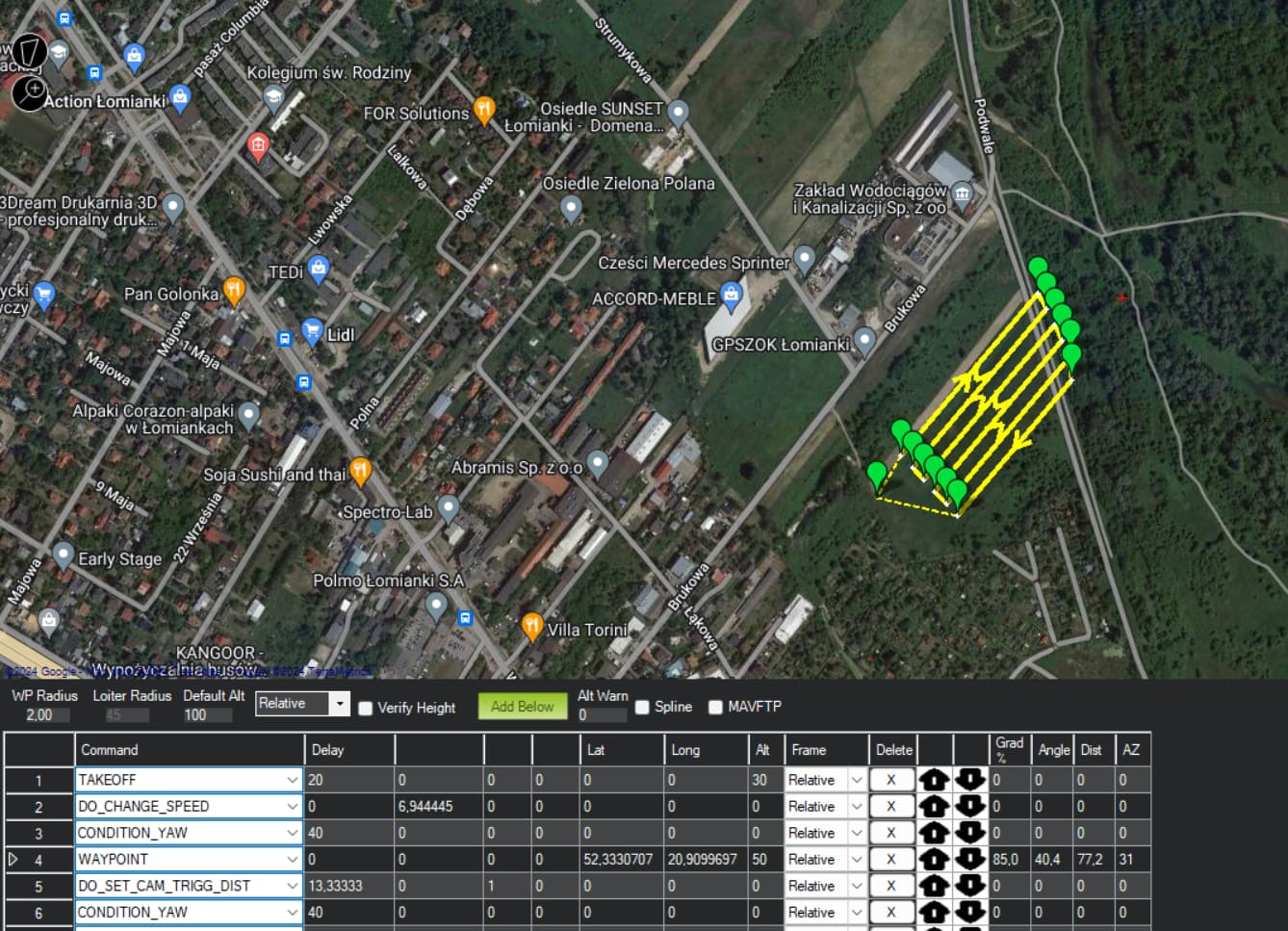
@dkemxr I am just using Mission Planner and PLAN screen and next AUTO WP/ Survey option and such Auto mission plan with DO_CHANGE_SPEED (“Use speed for this mission”) and this original mission created in Mission Planner doesn’t work. DO_CHANGE SPEED doesn’t change the speed. When I change something manually in waypoints and for example added empty WP and saved mission again and uploaded it to copter the speed in Auto mission is correct. I checked the mission plan file there are “.”
Reminds me of the issue in SITL where the speed variable was defined as integer instead of float, but that’s not the case here. Can you try setting the speed value to 6.9 instead of 6.94444466, just for testing?
Also as Yuri said, do change to latest MP beta. There is some format conversion and/or number rounding going on when exporting the entered values.
The log I reviewed did bear out the observation. I’m reasonably convinced it’s an old version of MP that is truncating some of the “DO” command parameters.
We have had a number of bugs in the past on both the GCS and firmware sides related to these commands, but I’m almost certain they have been addressed (as both Randy and I have shown with our independent assessments).
So old Mission Planner can brake waypoint file with speed 6.94444466 m/s during upload to copter ? Flight plans are text files. This 3 files are the same the only difference is speed…
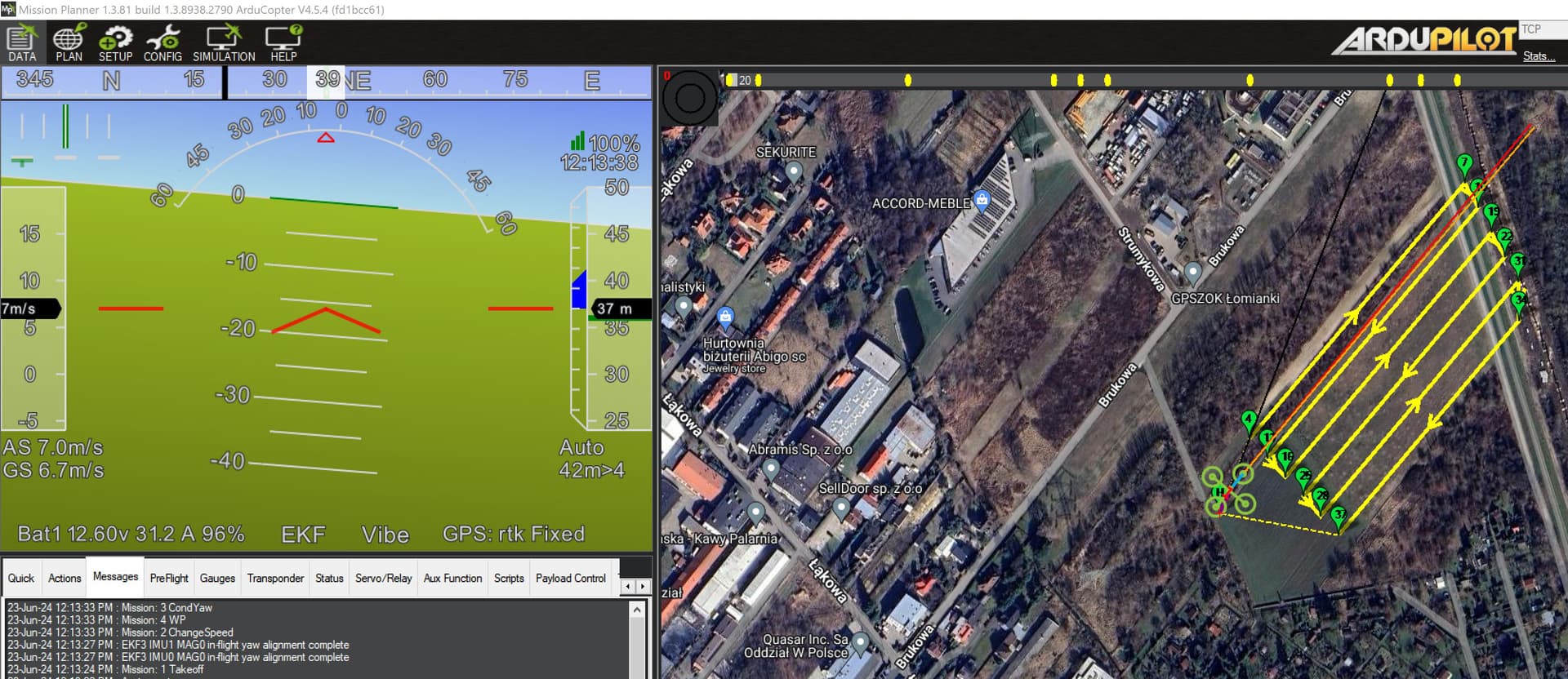
Today I did more flights. Mission Planner is updated. Before the first flight I uploaded the mission to the copter. The speed of mission was set to 25km/h and during first flight everything was ok. Next I did other tests I landed disconnected battery and next I started new flight I did some basic flight on loiter and next changed mode to AUTO and this time copter was flying 18 km/h with the speed from WP_SPEED not from DO_CHANGE_SPEED. Please check mission and logs from here:
When you switched to auto after whatever else you did, was the starting waypoint prior to the DO_CHANGE_SPEED waypoint? If the command is not processed, default speed is applied.
I am away from my computer and can’t look at the log. But I suspect we will find that the mission was entered at a point beyond the speed command.
That’s standard setting of waypoints from survey planning from Mission Planner.
Ok yes that’s possible but why that happened during second flight and not during first flight ? Is the position of the copter is important when AUTO mission is triggered ?
When I loaded your flight plan into the simulator and set WPNAV_SPEED to 500 and ran the Mission the DO_CHANGE_SPEED command was followed. Not sure why it didn’t in your actual Mission.
Run another test using that mission when you get a chance:
Take off in loiter mode. Switch to auto after airborne. The expected outcome is that the takeoff command is skipped, speed command is processed, and waypoints cycle at commanded speed.
I am not experienced in simulation in Mission Planner but I tried to take off in loiter and next go to AUTO mode and this mission and again result is good in SITL.
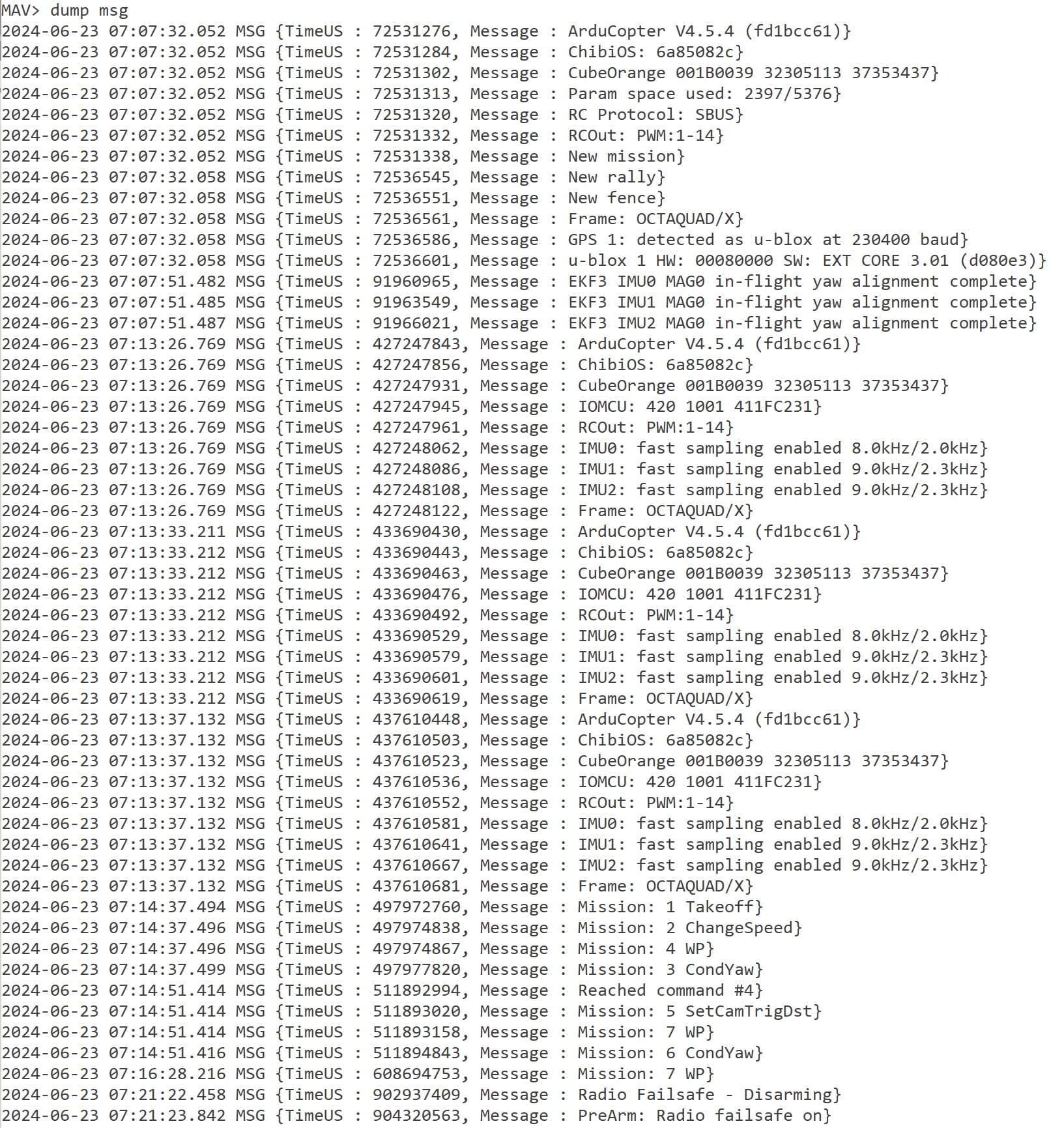
@dkemxr, if you get a chance before I do, can you dump the GCS message output from the last log shared? Curious to see if the mission was restarted from the beginning on each run, and if there is a “DO” command ack displayed.