@rmackay9 Thanks for the reply. That makes sense, please also note that in our case, sometimes the mission speed is excepted and sometime snot! that’s been the confusing part. We use both Solex and QGC, the waypoints speed in RC QGC are correct too, so its the Pixhwk that’s that following the syntax (Im assuming) PS We’re using Herelink system
OK, so the issue with do-change-speed is that it must appear after the first waypoint command. I guess this is discussed above already but in any case, it is on the list to fix, sorry for the troubles!
1 Like
Is this really a problem though? With a DO_CHANGE_SPEED command it will run at that speed until another change speed command is issued. So set the WPNAV_SPEED at what you want to run until WP1 then set speed commands as you like after that. Perhaps there is a use case I’m not considering?
Maybe this is that use case:
- User sets WPNAV_SPEED to a default, somewhat slow speed for survey or sprayer missions.
- Vehicle runs out of battery and executes a mid-mission RTL.
- User makes a slight modification to the mission to resume in the middle and sets a faster travel speed via DO_CHANGE_SPEED after takeoff followed by another DO_CHANGE_SPEED as the pattern is resumed.
- Faster speed is not accepted and user loses valuable flight time to slow speed.
2 Likes
Ah OK. Resume a mission at speed from take-off. That makes sense.
The point is, it doesn’t obey any or rather randomly obeys the Do_Speed change
For our case we rarely fly faster than 2ms (boring I know lol) so changing the settings for WPNAV_Speed to 2ms might override to a default. Our issue is that because the speed set via simple grid, which is set to 2 is ignored. As soon as we start a mission. Which is only WPs and an Alt (we arm and loiter to a rough closer location before auto) once in auto the drones takes of at 15ms! And we’re only 2m alt so that’s scary! ![]()
I’m not following why that would be the case.
If WPNAV_SPEED is set to 200 (2m/s) then that’s the speed it will start at when it begins the mission. Any DO_CHANGE_SPEED commands after that should take effect.
It’s not random really…
Maybe provide a log of a scary case. I of course believe you but it doesn’t quite match with what I think AP’s behaviour is.
2 Likes
Hi
Is that problem is corrected in 4.5.4 ? I created survey mission in Mission Planner and still option DO_CHANGE_SPEED doesn’t work. Copter fly with the speed from WPNAV_SPEED :(((((
Ok I checked this problem in flight with my copter and arducopter version 4.5.4. Problem from first post still exist! DO_CHANGE_SPEED in auto missions doesn’t work when the speed is not set in full meters/second. So if you set speed in km/h you newer know it will work or not if you don’t have calculator in your head. It looks also that work around with additional WP point with 0 values also fixing this issue but still after several years I think it is worth to fix this bug @rmackay9 ???
Hi @norim,
I just tested this in the simulator and do-change-speed mission commands seem to be working fine so perhaps you could provide logs and the mission you’re running and we can have another look. I suspect the issue is not AP flight code related and instead related to the GCS but that’s just a guess at this point.

Hi @Yuri_Rage, OK, thanks for the clarification.
I’ve tested with floating point speeds and that also seems to work

1 Like
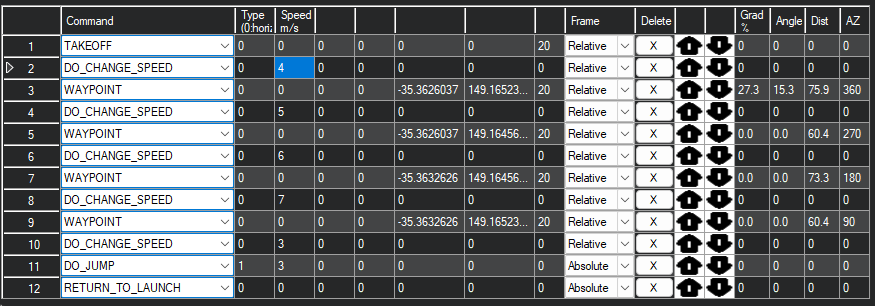
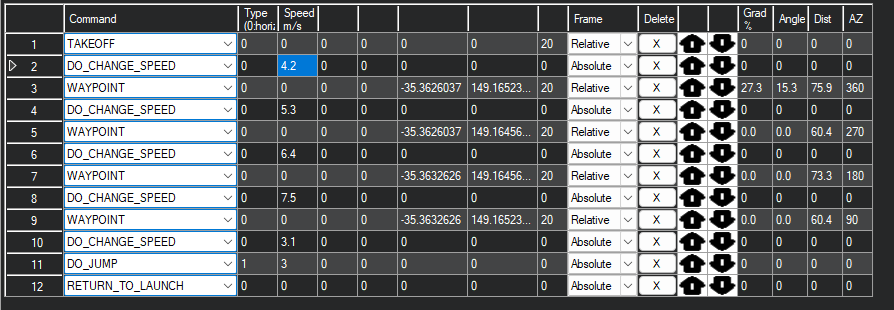
I am planning missions with km/h because I am thinking in km/h so in Mission Planner usually I get m/s with long decimal numbers (like 6.944445) and for example this doesn’t work:

A log would be appreciated, SITL will do if the issue is visible there.
Here you can download log…
https://drive.google.com/drive/folders/18kIO1-AFfJfdRfcC_3F7RS95PE3vjSGD
First flight forward is with 18km/h and should be 25 km/h and than I landed
second forward flight in auto is with simplified number without long decimal numbers and it is ok 25 km/h next I landed
and third forward flight in auto is with added WP point with 0 values.
Update Mission Planner to latest beta, as well.
Dear @Yuri_Rage Mission Planner only creates waypoints which are ok. You can see that in the image in my previous post. I think the problem appears when speed value in WP (in m/s) has many numbers after “,” . That bug exist for several years now and it’s makes complications for people using km/h. @rmackay9 I think you can easily replicate this just set DO_CHANGE_SPEED to 25 km/h.
No matter how many times you repeat yourself, this is not reproducible with Copter 4.5.4 and Mission Planner 1.3.81 build 1.3.8938.2790. I entered the exact decimal values you show in your screenshots, and the Copter behaved exactly as expected.
There WERE bugs in previous versions that have long since been fixed. Update to Mission Planner latest beta.
2 Likes
Are you using a , (comma) as a decimal point for speed? You state that here but it’s hard to tell from the image you attached.