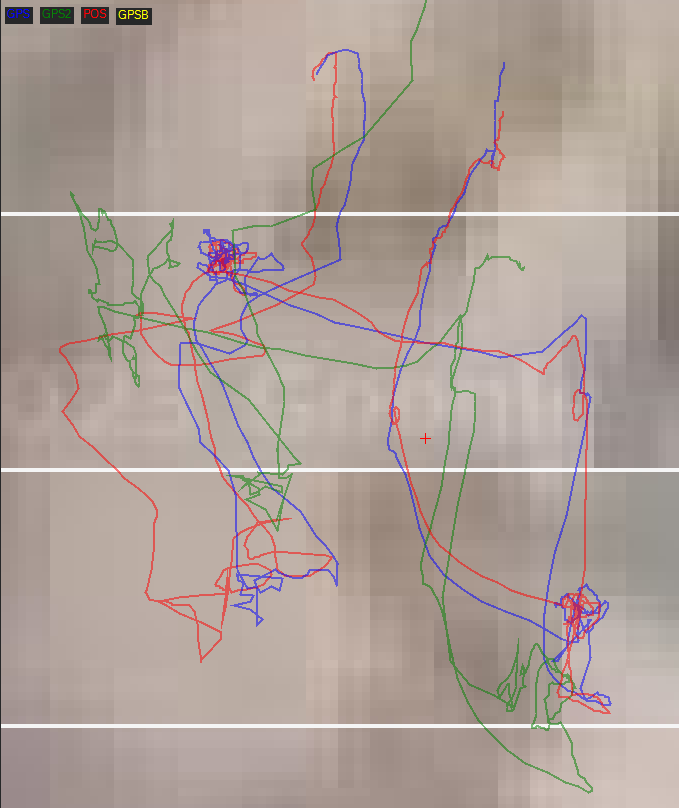
I’m disable GPS checks because i’m have GPS unhealthy messages which related to GPA.delta abnormal - maybe related to CUAV NEO 3 GPS which working with CAN line or maybe other problems - dont know… at the same time, both gps always have 3dfix.
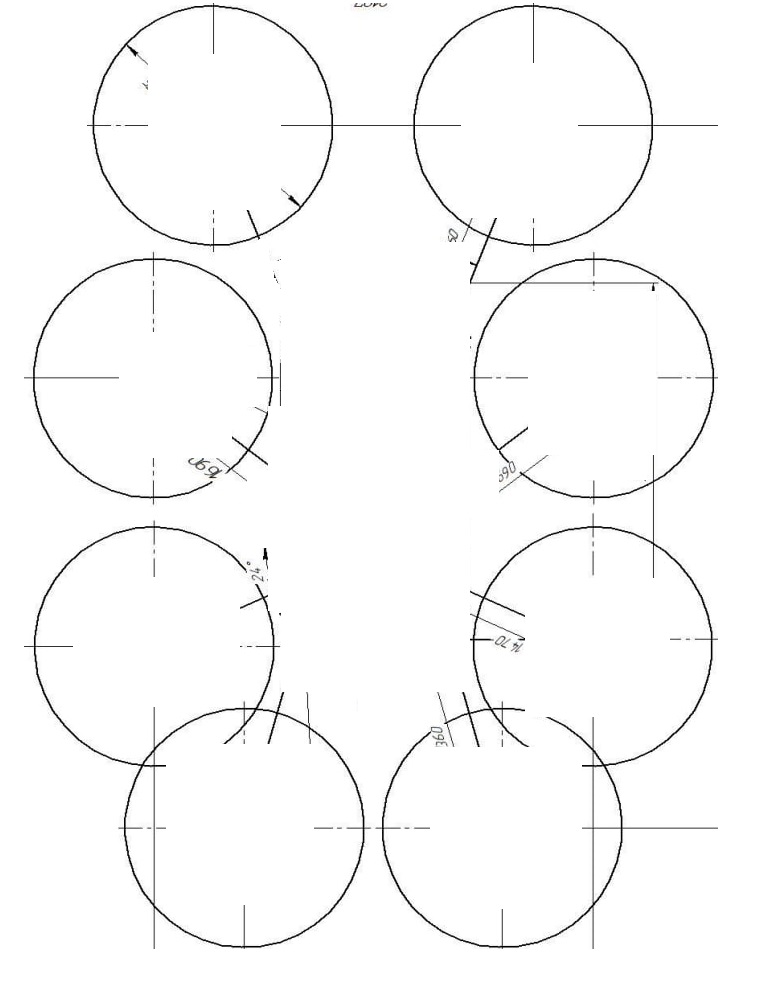
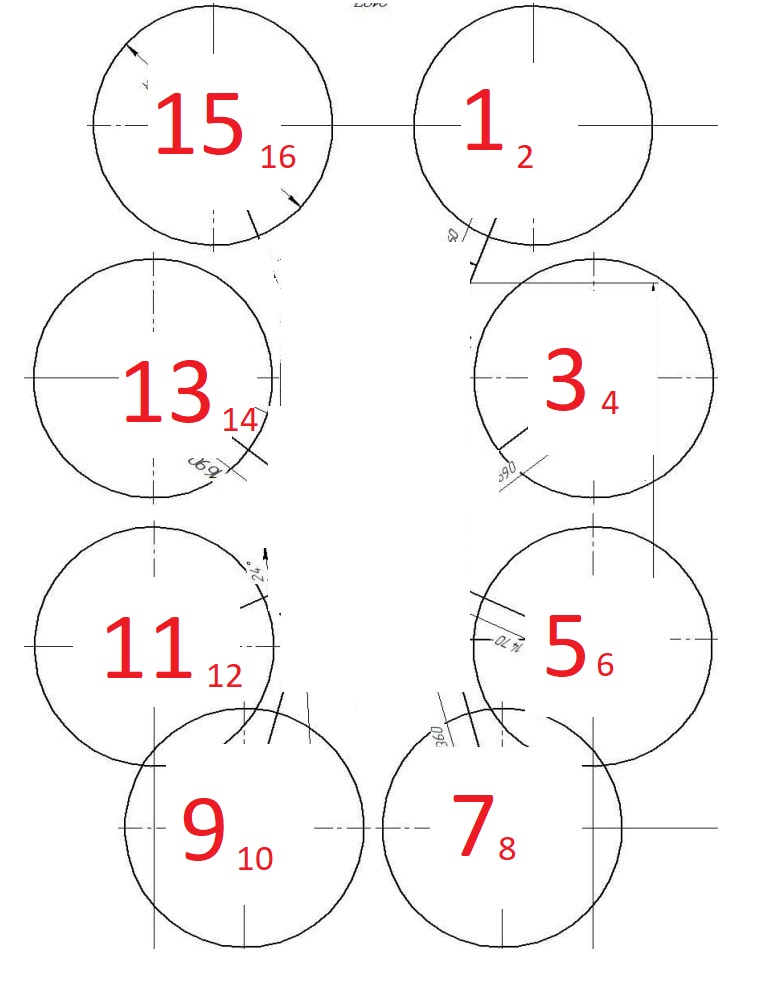
My mixer for all motors
{ 22, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 1 },
{ 22, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 2 },
{ 53, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 3 },
{ 53, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 4 },
{ 114, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 5 },
{ 114, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 6 },
{ 164, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 7 },
{ 164, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 8 },
{ -164, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 9 },
{ -164, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 10 },
{ -114, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 11 },
{ -114, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 12 },
{ -53, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 13 },
{ -53, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 14 },
{ -22, AP_MOTORS_MATRIX_YAW_FACTOR_CCW, 15 },
{ -22, AP_MOTORS_MATRIX_YAW_FACTOR_CW, 16 },
Big number - upper motors
Ok.
I’m try what you say and test again. thanks.