Ya, experience once bad experience, drone climbs endlessly and hit ceiling. That is why I do not dare to arm and fly with such a rangefinder prearm warning. I do see the Rangefinder2 under Quick UI showing the correct cm.
ok, so there is another rangefinder besides the Hereflow’s rangefinder right? The Hereflow rangefinder does not need to be RNGFND1_… so set the RNGFND1_TYPE to match the othere (non-Hereflow) rangefinder.
The vehicle shouldn’t fly up endlessly unless an analog rangefinder is being used. With other rangefinders we should be able to detect once the rangefinder is out of range. If you’ve got a link and/or a log file for that endless climb could you provide a link to it?
@rmackay9
Thanks, works! I moved all to RNGFND1_xx, do not enable the Hereflow onboard lidar. Rangefinder preArm check enabled and no warning. took off both outdoor and indoor Loiter mode is within expected behaviour and without an external GPS installed.
thank you for the guidance and patience.
Could it be that no Range finder in 1 caused the bouncing flight I had with the super flat indoor surface with SURFTRAK_MODE=1, just curious? I may have to plan time to do a repeat test.
I have concluded that it is not due to skipping of RNGFND1, SURFTRAK_MODE=1 on our super flat blue surface not tracking well.
I upgraded to 4.2.2 and noticed that in status window, mag_ofs_x, y & z are shown as zero. Recaliberated the compass twice but still show zero when connected.
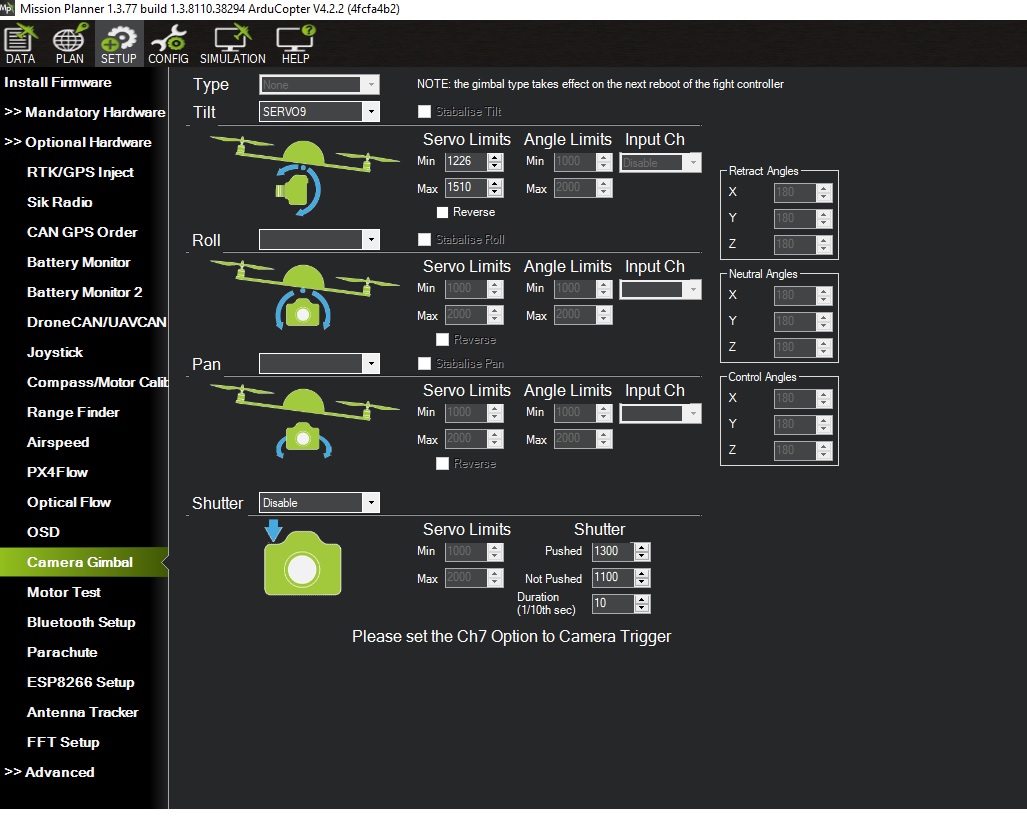
Hi guys and girls, Just updated from 4.0.7 to 4.2.2 and i have a lot of changes in parameters that i need to set again. But that’s not a big deal. I have problem with camera gimbal option, before it was set to Servo and i used Servo9 function to control Tilt from Channel 6 on transmitter. Now that option is greyed and i cant controll my gimbal.
As @dkemxr says, it could be that the camera gimbal (aka “mount”) has been disabled on your flight controller so if you could tell us what flight controller you’re using that would be good. As far as I know the mount library should be available on all flight controllers.
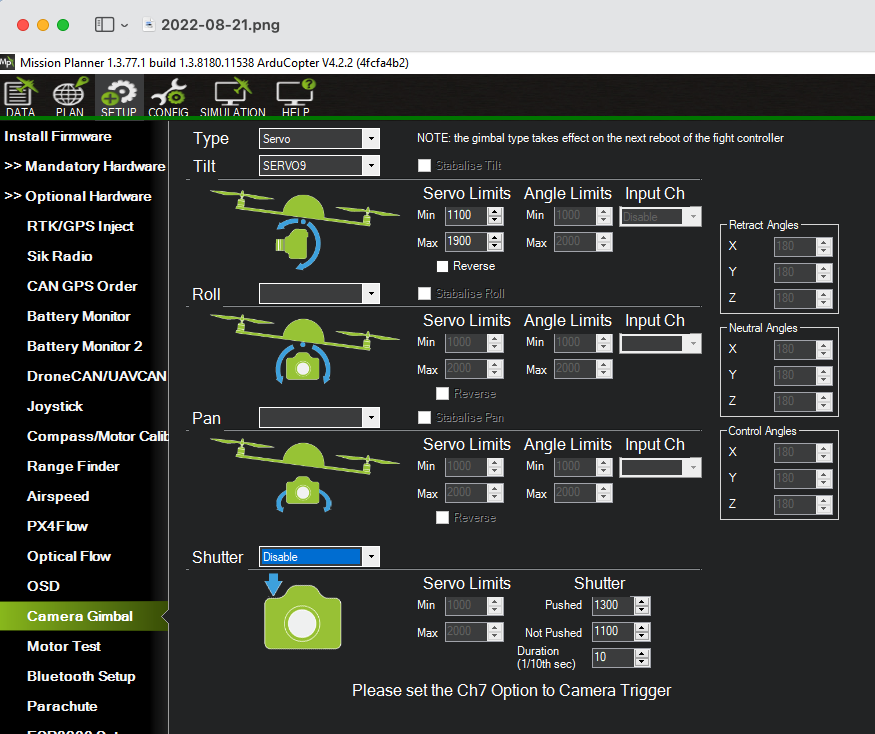
I updated MP to latest beta version, still on 4.2.2 FW and no change, still grayed out. I temporary configured servo 9 to RCIN6 and do settings on Taranis so i can fly. Im using Pixhawk 2.4.8 with Tarot gimbal connected only signal wire to AUX on flight controller. That worked like a charm until i updated FW on flight controlled
Pixhawk1 is the correct firmware for that Flight Controller. Download the .apj file from here and use the “load custom firmware” button in MP to flash it. Pixhawk1
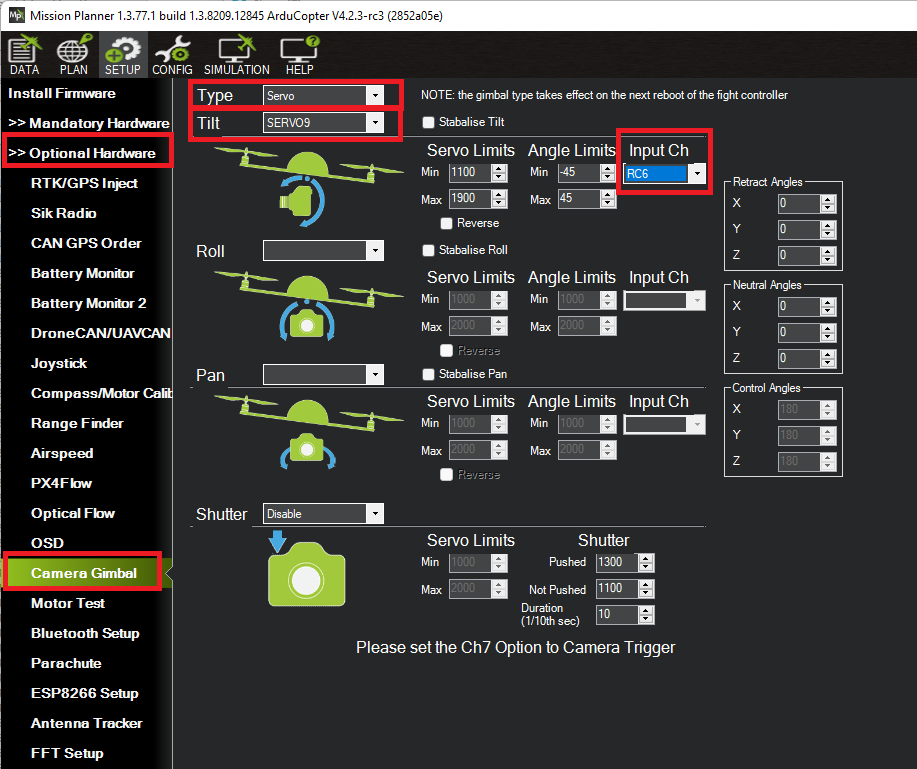
Loaded custom firmware and now i got servo option for gimbal. After load i got EK2 and EK3 disabled. For now i enabled both but is that ok for this board or i just need to use one of them? Also after update i still got pre arm mot min-max set to 0. I read in 4.2.3 release that option is fixed but i gues for me is not working.
I forgot to say that after upgrade from 4.0.7 i got very crisp yaw, i tried to increase some expo on transmitter but still need more softness. Is there a any option that changed from 4.0.7 on yaw expo or other gain stuffs that i can change in params to get that solved ?