Copter-4.2.0-rc2 has been released for beta testing and should be available shortly for download from MP or QGC using their beta firmwares links. It can also be directly downloaded from firmware.ardupilot.org.
The changes vs -rc1 are in the ReleaseNotes and also copied below
Minor Enhancements
a) Button, Relay and RPM GPIO pin conflict pre-arm check improved
b) DShot uses narrower bitwidths for more accurate timing (allows BLHeli BlueJay to work)
c) iFlight Chimera default parameters file added
d) INS_NOTCH parameters renamed to INS_HNTC2
e) Matek F765-Wing-bdshot firmware added
f) Matek H743 supports ICM42688
g) QiotekZealot H743 supports ICM4xxxx
h) Scripting heap size increased to 100k on F7/H7
i) SPRacingH7 improvements including external flash performance improvements
Bug fixes
a) BMI088 IMU FIFO overruns fixed
b) DO_SET_SERVO with SERVOn_FUNCTION=0 fixed, added pre-arm check of servo functions configured on disabled channels
c) Log file descriptor init fixed (issues only seen on Linux autopilots)
d) Log list cope with gaps, performance improvement to reduce impact on EKF and some ESCs
e) Proximity sensor fix when using MAVLink lidars in non-forward orientations
f) RPM sensor fix to avoid “failed to attach pin” spam to GCS
g) STM32 DMA fatal exceptions disabled (caused watch dogs reboots with zero information)
h) SysID mode bug fix (was not restoring body-frame feedforward setting upon exit)
i) Tradheli autotune fix when max frequency is exceeded
There are still a few issues we need to resolve before we can release 4.2.0 as the stable version but we are getting close thanks to the feedback we’ve received so far. so thanks very much!
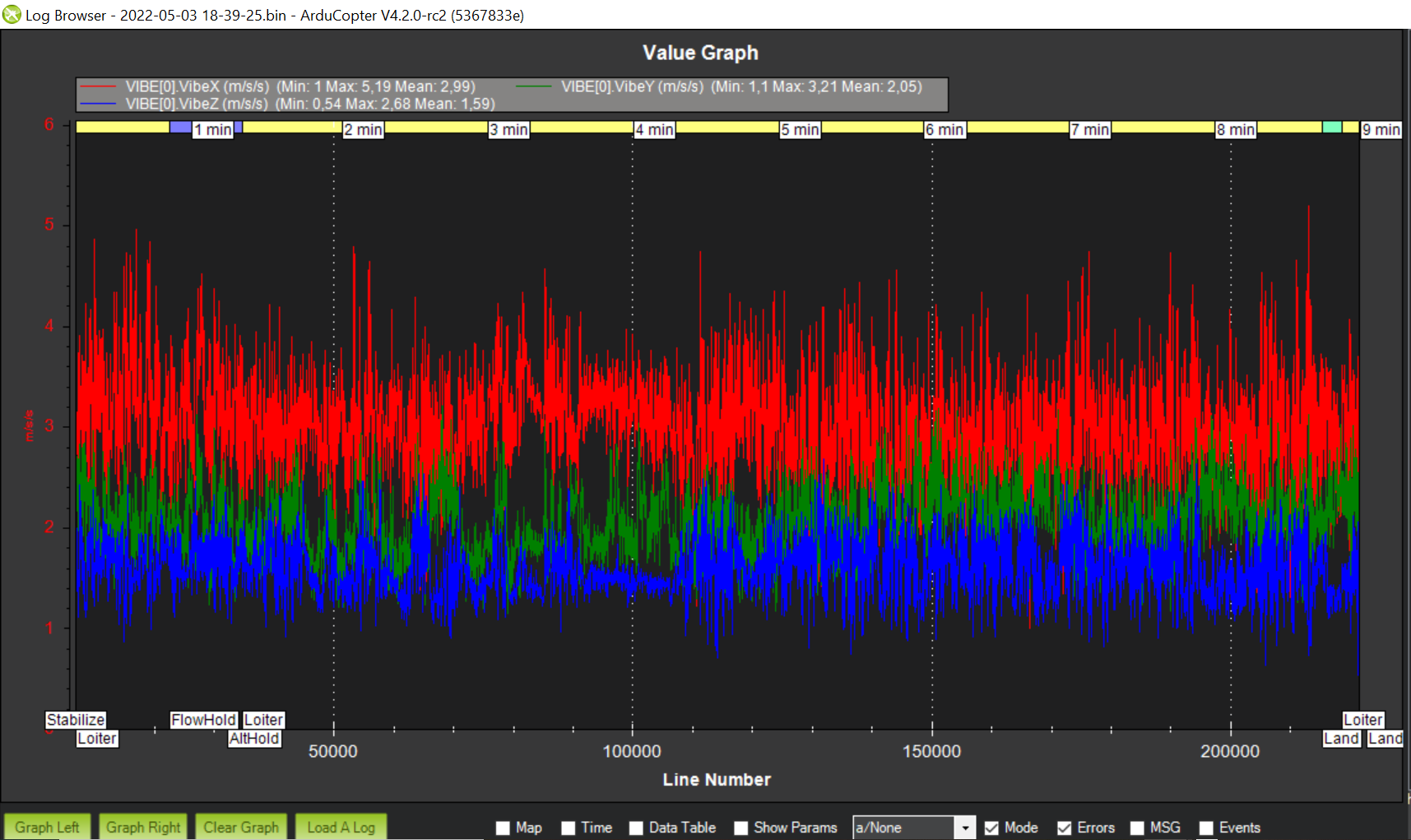
tested yesterday RC2. Copter sub 250 gr (218 gr) 3 ". 9 minutes of flight and I have not encountered problems in stabilize, loiter, flow hold, land.
Thanks!
possibly a bug?
Copter 4.2.0 (rc I will add tomorrow)
Cube Orange
If I connect a UAvionix Ping to Telemetry 2 with Mavlink 1 and 57600 baud, MissionPlanner and QGroundontol cannot read the parameters from the Cube. Neither with UDP nor with serial connection. If I disconnect the UAvionix ping, it works without changing any params. Mavlink 2 runs at 115200 on 2 other serial ports.
Am I right that now we have two different harmonic notch filters with the possibility of setting different non-trivial sources? Like bidirectional DShot for INS_HNTCH and FFT for INS_HNTC2?
Speaking of INS_NOTCH renamed to INS_HNTC2 I noticed that after updating to -rc2 the Static Notch values I had did not translate to the HNTC2 parameters. Set to default I guess.
Would like to report that we tested this release on a Cube Orange setup with Kore carrier board, two Here3 GNSSs configured as blending, one LW20 lightware rangefinder pointing down, and a companion computer for precision landing connected via serial.
Results were rock solid, specially with the new precision landing logic that now provides feedback and can be configured to retry the landing if the target is lost. This feature worked nicely and we were able to land precisely on top of our fiducial markers.
Manual flights as well as automated missions performed without any problems. Looking forward to the stable 4.2, I think it’s quite ready.