@xfacta
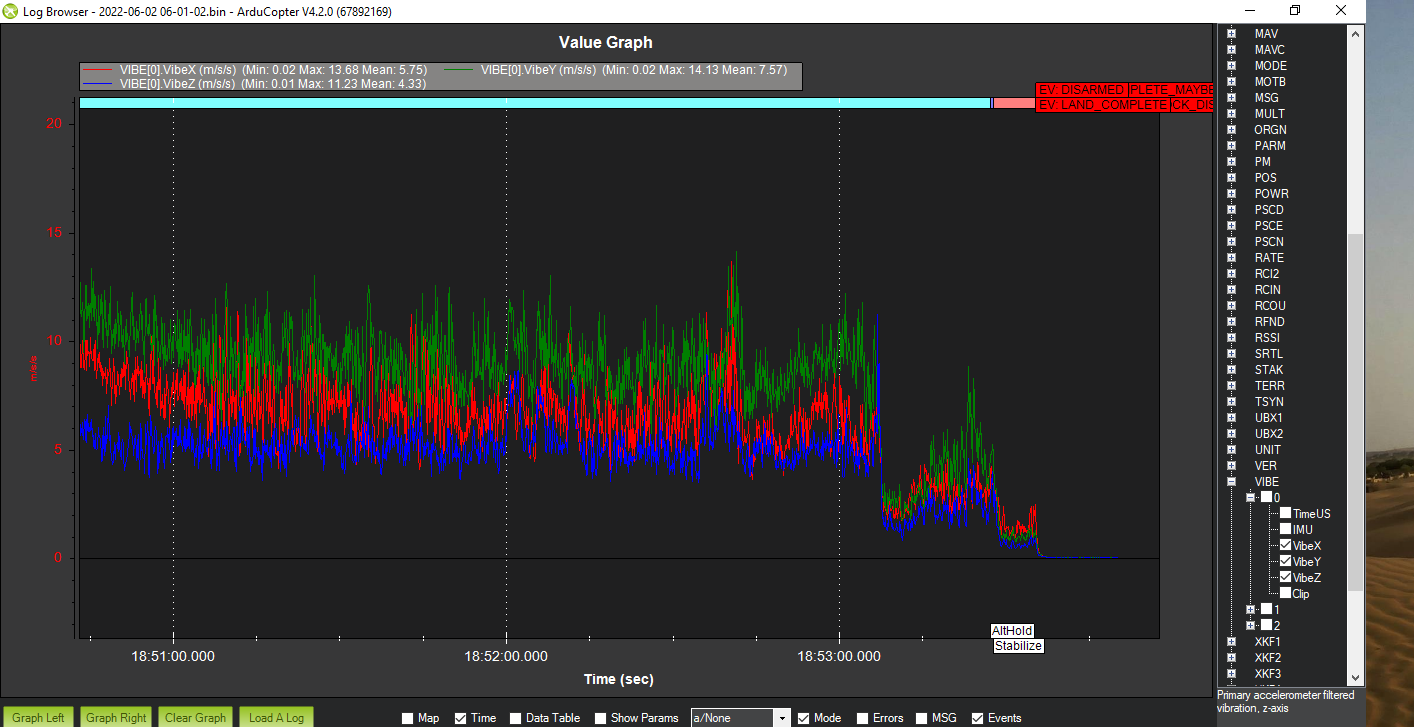
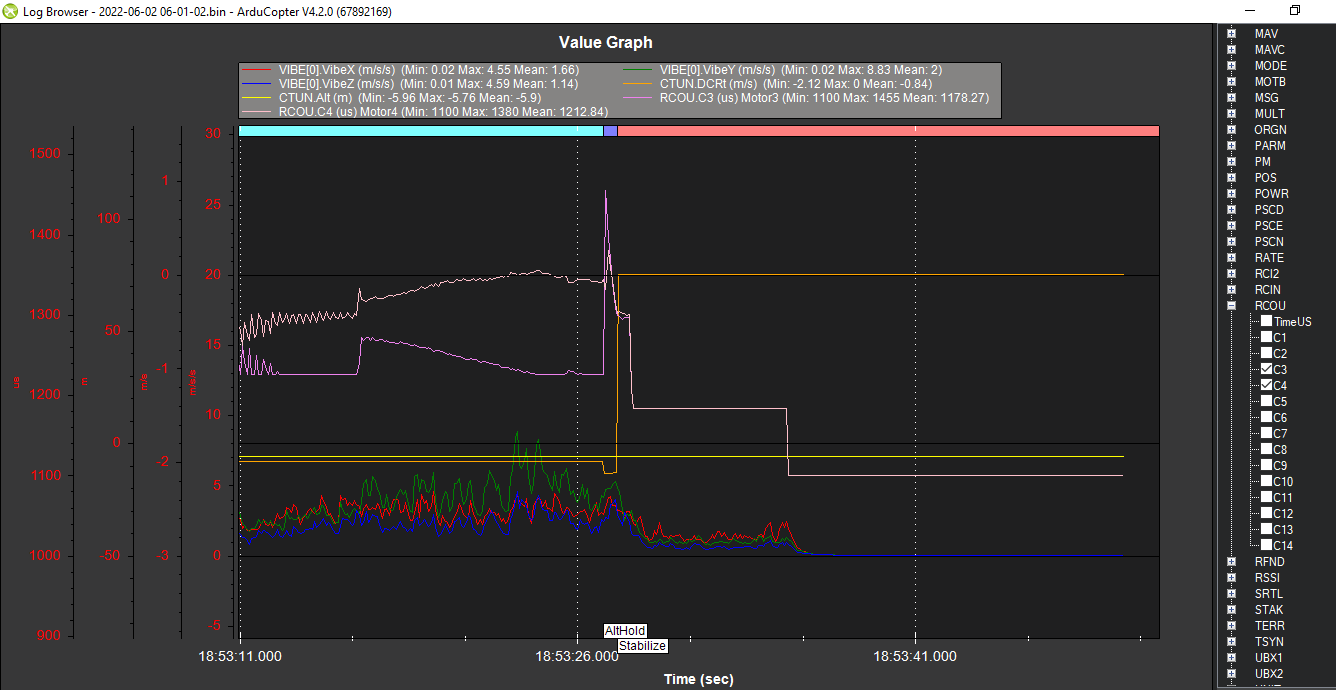
Could you see in the log that its not auto disarmed after landed.
After landed i have changed to stabilize mode from my rc transmitter then yaw left to disarm otherwise it wouldn’t disarm its own.
How to solve this ?
all X,Y and Z vibration are less than 15 only.
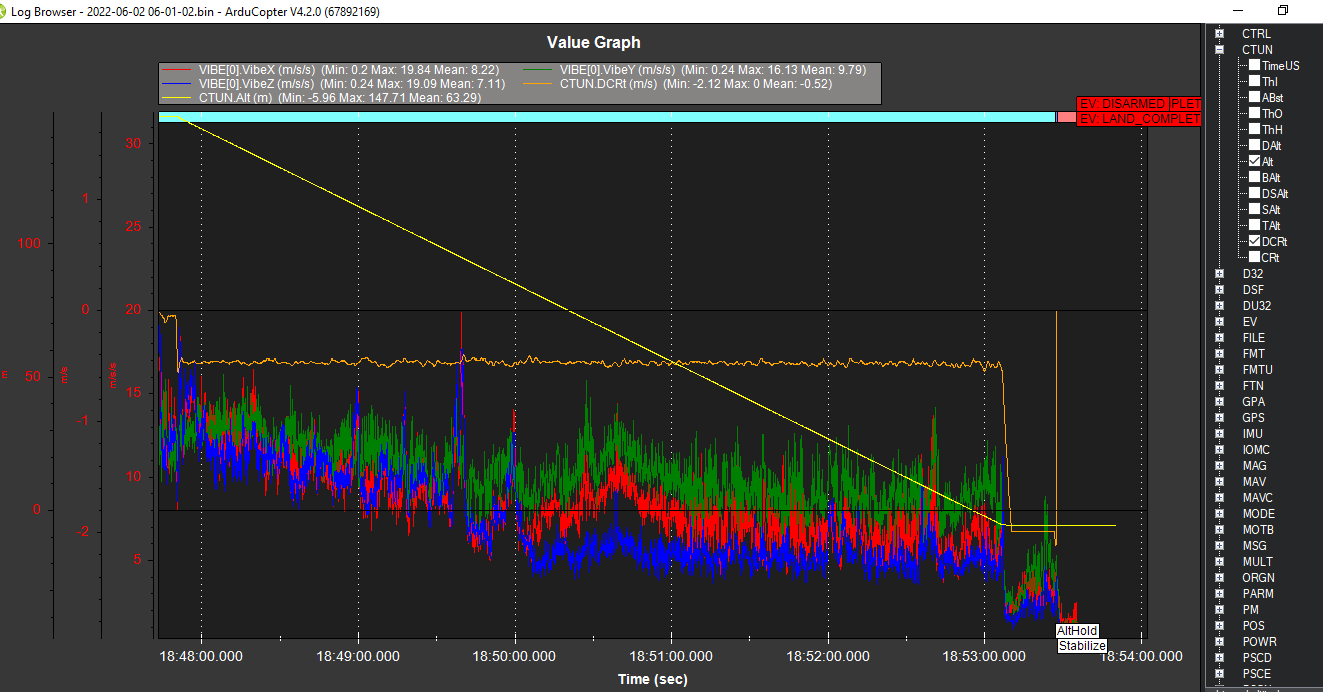
below you could see that from at al altitude of 150m its descending at 0.5m/s descend speed i don’t know why even i set 1.5m/s speed. if possible @rmackay9 also can look at this issue.
I’m using the Lidar-Lite v3 with Copter 4.2.0 rc-1 (not the stable version) and it’s working. I also get the prearm warning you mentioned when the lidar is not powered correctly. The warning is new, but the functionality has not changed, I guess. Check if your power supply is sufficient for the Lidar. Power from I2C alone is not enough. The GND pin needs to be connected to both, the external power source and the I2C-GND-cable. If that’s all okay, it could be a problem with I2C addresses or too long cables.
HII,
here I want to ask about the Realsense T265 camera to access it on pixhawk.
does Realsense T265 camera support for ardupilot 4.2.1 firmware? and if possible what parameters are changed in the EK3?
Because I have a problem, when I try to fly my drone with the latest firmware, when arming in Loiter mode, the drone won’t run. what do you think is the problem?
no I mean, I have connected Realsense with Jetson Nano using UsbTTL communication protocol. and use GCS with MP settings
EK3_SRC1_POSXY = 6 (ExternalNav)
EK3_SRC1_VELXY = 6 (ExternalNav)
EK3_SRC1_POSZ = 1
EK3_SRC1_VELZ = 6 (ExternalNav)
GPS_TYPE = 0 to disable the GPS
VISO_TYPE = 2 (IntelT265)
And is there any additional components or other parameters on the Aducopter 4.1 and above?
Re the AP+VOXL2 port, I’m afraid it still hasn’t started although coincidentally we met with the ModalAI engineers yesterday. At the risk of “passing the buck” at this point, the next step is for the ModalAI engineers to free up a couple of weeks in their schedule to work with us.
On a positive note though, AP+VOXL1 is working great but you should definitely use 4.3.2 (or higher) because we found and fixed an important bug in the consumption of the ODOMETRY message the camera sends.