@rmackay9 here are the results of my testing of this on my cubeblack using the provided param file
Params of note in @Mallikarjun_SE’s file EK3_IMU_MASK 7 (That will certainly affect how much memory is avaiable) CAN_P2_DRIVER 2
GPS params setup for moving baseline.
4.2Beta.RC1
In my reproduction using different CAN_P2_DRIVER: CAN_P2_DRIVER 0 → freemem = 24,200 CAN_P2_DRIVER 1 → freemem = 19,824 CAN_P2_DRIVER 2 → freemem = 9,392 (when enabling this I once got the out of memory message but not every time)
No pressure of course but could you get the numbers for 4.1.5 as well with these various parameter changes? I think the concern is that the available memory has dropped significantly in the move to 4.2 but we’re not sure what the actual drop is.
These are sort of interesting it seems there is something tkaing 1.5KB and releasing it every so often here say 10 seconds. (maybe due to not having serial F9Ps GPSs connected) I let things settle down of course for a bit.
In my reproduction using different CAN_P2_DRIVER:
CAN_P2_DRIVER 0 → freemem = 29702 or 30344 CAN_P2_DRIVER 1 → freemem = 24440 or 25728 CAN_P2_DRIVER 2 → freemem = 7304 or 8584
So for me at least with P2 active we have less memory available on 4.1.5
But I’m not sure if the massive differential for adding the second different driver makes sense vs just the first driver. That second driver costs 3X the memory of the first ???
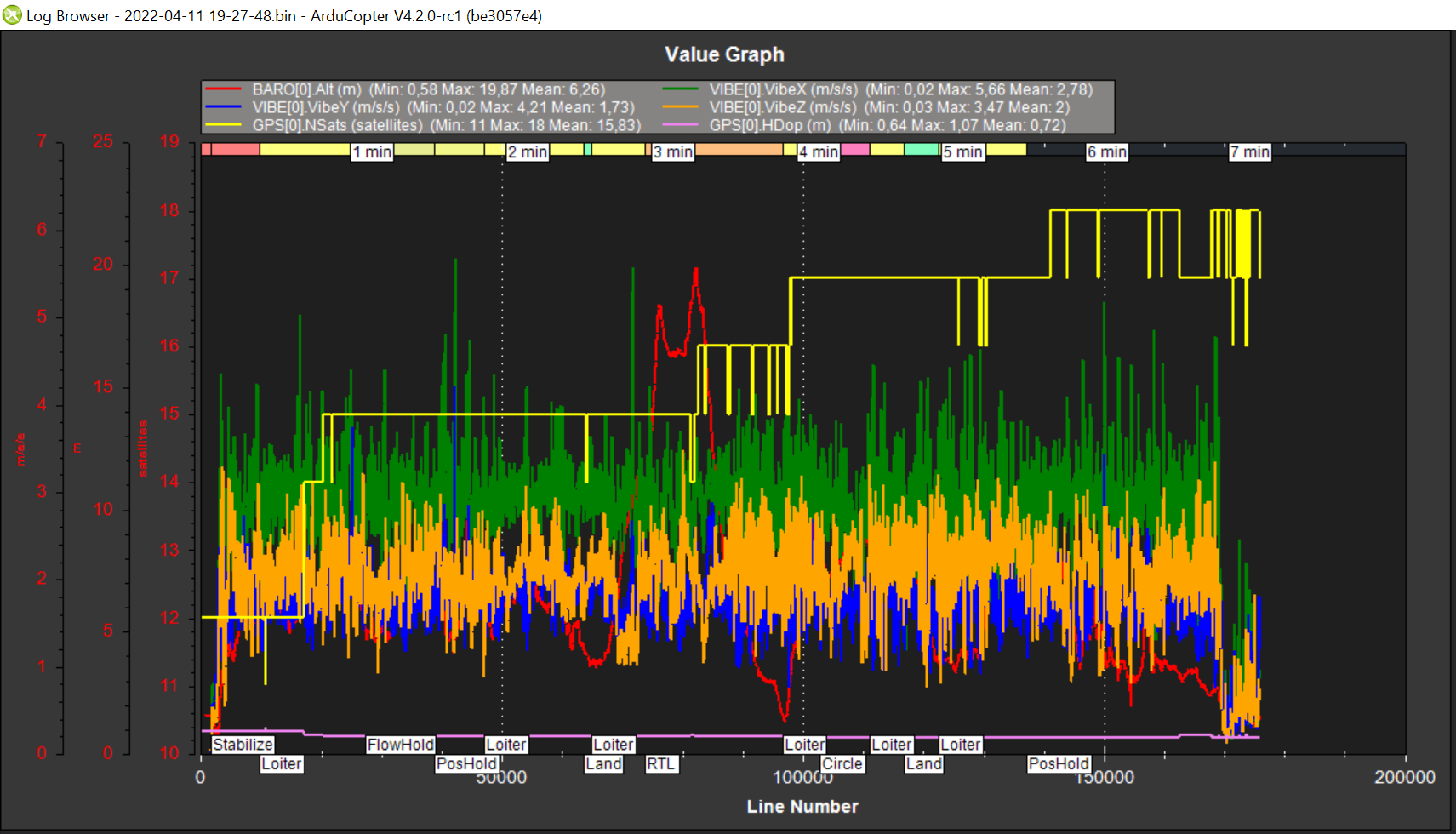
I tested the 4.2 RC1 on a small 218 grams quad (omnibus nano v6.0). The copter performed well in stabilize, loiter, poshold, flowhold, RTL, land, circle. Ok yaapu telemetry. no anomaly found. Low vibration and good reception and hdop gps.
Thanks to the developers!
Is there any benefit in using two drivers (CAN_P1_DRIVER 1 and CAN_P2_DRIVER 2) for two CAN gnss units instead of one (CAN_P1_DRIVER 1 and CAN_P2_DRIVER 1)?
I guess there is some redundancy advantage in that the CAN bus could theoretically fail if say one GPS failed and made the bus unusable. I think this is very unlikely though. If there were many devices on a single CAN bus then it could hit bandwidth issues but this is also very unlikely with GPSs I think.
I have a Cube Black at my disposal (not installed on any critical vehicle) and can test as needed if you give me specific cases to test against regarding these memory issues.