was it a one time thing on this board when using the June 1st firmware linked or did it happen more often?
It was a consistent error, happened through a few power cycles and the next day when I tried again.
has had a look at the watchdog reset and says we have resolved a couple of issues in 4.1-beta5 that could cause this. Did it happen just as you tried to arm the vehicle or at some other time?
Great, thanks for the feedback. … because the failures happened at arming, we are somewhat hopeful that -beta5 will have resolved this because we fixed an issue with the delays during the start of logging (which happens during arming).
Here is a log from my first flight with beta5, not sure if it threw any watchdogs, but it didn’t crash so that’s always great. It flew good in stabilize but loiter did somewhat of a toilet bowl. I think its poor quality gps (I added a 2nd) or improper configuration (I have been messing with the settings). I followed the guide for GPS blending and I think I put GPS_AUTO_SWITCH to 1 because the gps are supposed to be identical, maybe I’ll try blending/2 and setting all the GPS settings back to default
Eagerly awaiting beta6 and hopefully restoration of my i2c display on pixhawk1m
Its sister craft always has had better loiter performance, not sure why. I’lll work on getting that up and going and eventually post a log for comparison.
I guess since its beta 5 i’ll post in that thread from now on
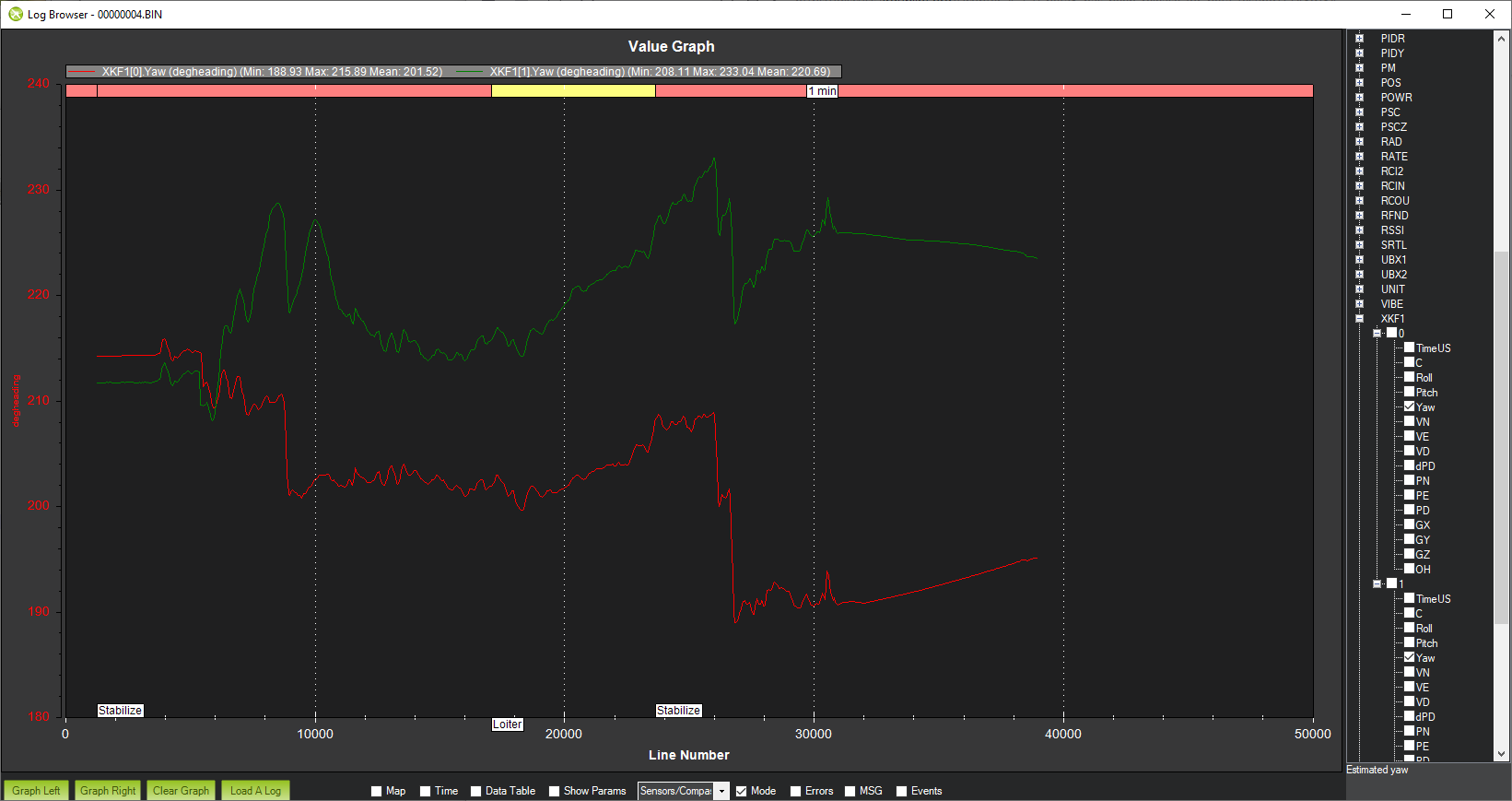
Txs for testing and providing a log. “Toilet bowling” is normally caused by the vehicle having an incorrect heading which normally comes from the compass so it is unlikely that GPS blending or switching is related. The most common cause of a bad heading is interference from the motors.
The first compass looks fine to me but the second one (the internal compass) is suffering from a lot of interference. Could you try setting COMPASS_USE2 and COMPASS_USE3 = 0?
I think it is suspicious that the two EKF cores have different headings so I will ask @priseborough or @tridge if they have any ideas why.
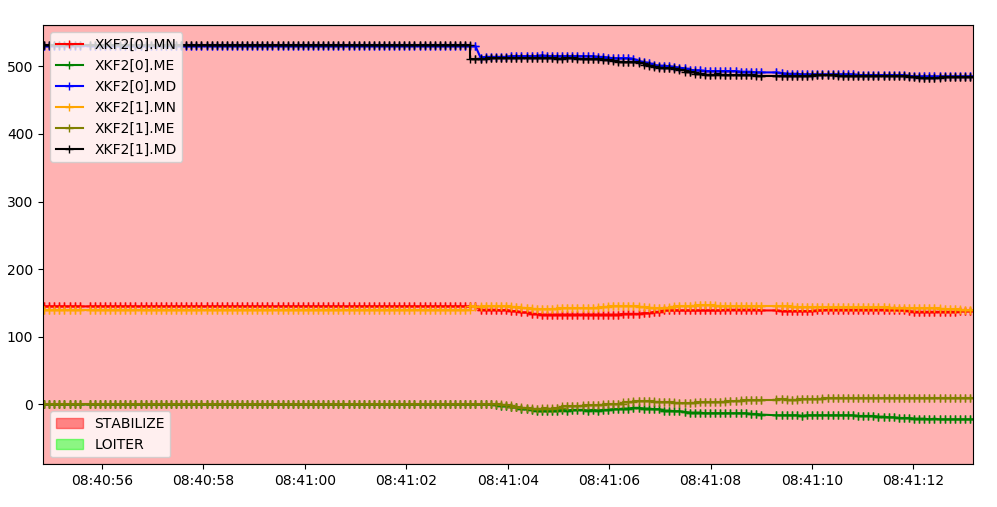
We are supposed to use the published declination for that location to ensure the earth field learns to the correct rotation, however looking at the log I see that the automatic use of the declination has been disabled via COMPASS_AUTO_DEC = 0 and the value of the declination set by COMPASS_DEC is 0.
The published declination for this location is 13.9 deg.
Please refly with COMPASS_AUTODEC = 1 or set COMPASS_DEC to the correct value for your location.
My apologies, I turned off the auto declination because in my basement the gps was sometimes putting me all over the globe when it first booted and I was thinking it could set the declination at the wrong coordinate. I meant to manually enter a declination but apparently I forgot that step. But thinking about this more its probably not something to worry about and I should just set it to auto. Thanks for taking a look at my logs, gentlemen
edit Just ordered a Matek M8Q-CAN GPS for each of my MR’s, which has a mag so that should help with having a fall back mag and comfortably disabling the on board Pixhawk one. That should open up a UART so I can run a Thoneflow optical flow sensor