For testing and learning I use a F450 type X-style quad with a Pixracer R14 (Chinese clone) FC which has been running well for a couple of years using PX4 and QGroundcontrol.
I wanted to test Arducopter and Missionplanner so recently I made the change and ended up in a learning curve where the main problems were some sudden crashes for which I sometimes could not pinpoint the reason.
After recalibrations, buying new batteries and exchange of some components everything worked. All modes like AltHold, PosHold, Loiter, Land, RTL worked well so apparently I had found some working settings.
First autotune round (roll, pitch and yaw) went well but I felt that parameters were on the tough side so I reran and roll and yaw completed fine but pitch ended up in crashes which I could not explain. Crashes were of same style as the ones I had earlier experienced, ie a sudden fall from the sky. The first time of pitch autotune was quite smooth but the second one did visually appear to be much rougher.
I enclose a link to uploaded logs labeled 1-…, 2-… and 3-… The #1 and #2 logs are recorded during two separate runs for autotuning of pitch and #3 is recorded after repair of legs and just shows a few normal tests (no autotune) which all went well.
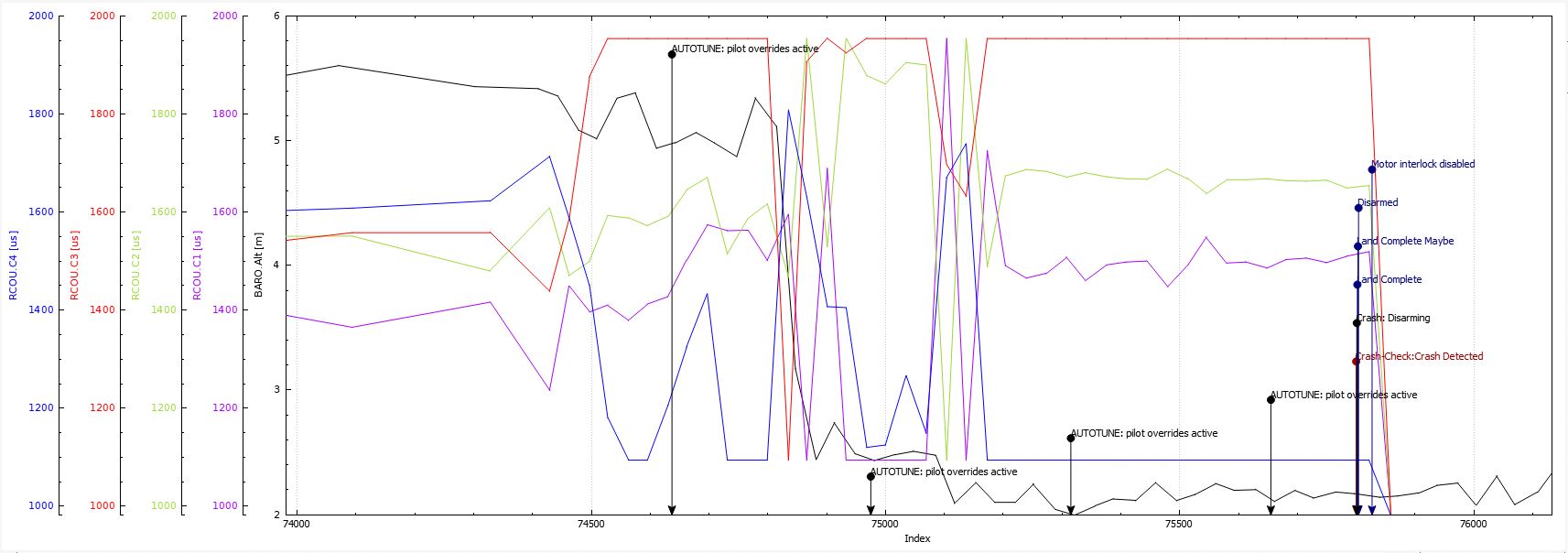
From log #1 I found some peculiar curve points for Att-yaw just before the crash. Att-pitch and Att-roll I am not experienced enough to judge but my guess is that they are OK. For RCOE C4 went steeply high while C3 went low and my conclusion was that the C4 motor and/or esc were failing. So I replaced the C4 Esc.
Next autotune run for pitch is shown by log #2. The pattern for RCOE curves for C3/C4 are similar but now C3 is the one running high while C4 is going low. And that is why I am writing to ask for some assistance with the interpretation of these logs. C3-C4 axis seems to have a problem but I am not yet experienced enough to read from the logs what might be causing this (my interpretation might also be totally wrong).
Log #3 is just a test run directly after repairs caused by latest crash. AltHold, PosHold, Loiter tested OK a nothing extraordinary happened. A jpg of RCOE curves is also uploaded together with the logs and the link is here:
https://1drv.ms/u/s!AuPg1RhV9PQ4zE4TR3Ww64k3ltW1?e=s5yTgv
I will be very grateful for any assistance which can help me find the root cause of these problems.
 I will change them now.
I will change them now.