@rmackay9 - I am still noticing a loss of yaw on take off and ascent. This seems to correct itself later in the flight. Log link below.
@Pedals2Paddles - Pitch is working as expected but roll is still backwards from an FPV perspective. My thoughts are that when you move the stick left the circles is clockwise, right counter-clockwise.
I noticed that the transition from left/right requires releasing the stick when you reach 0 (no direction).
Is there a chance we can add a multiplier parameter to adjust how quickly circle rate changes?
Edit: Maybe even a circle_rate_max value that can’t be exceeded?
Edit 2:0 Oops, first link was to the wrong log. I hate Google drive sometimes
Clear and calm in the Midwest so went ahead and performed an auto-tune with RC4. The only thing I noticed was that yaw tuning took a bit of time. Still noticed that the vehicle loses yaw on take off even after auto-tune. Flew beautifully otherwise.
Edit: Google drive and I are not getting along today. Bin instead of log file.
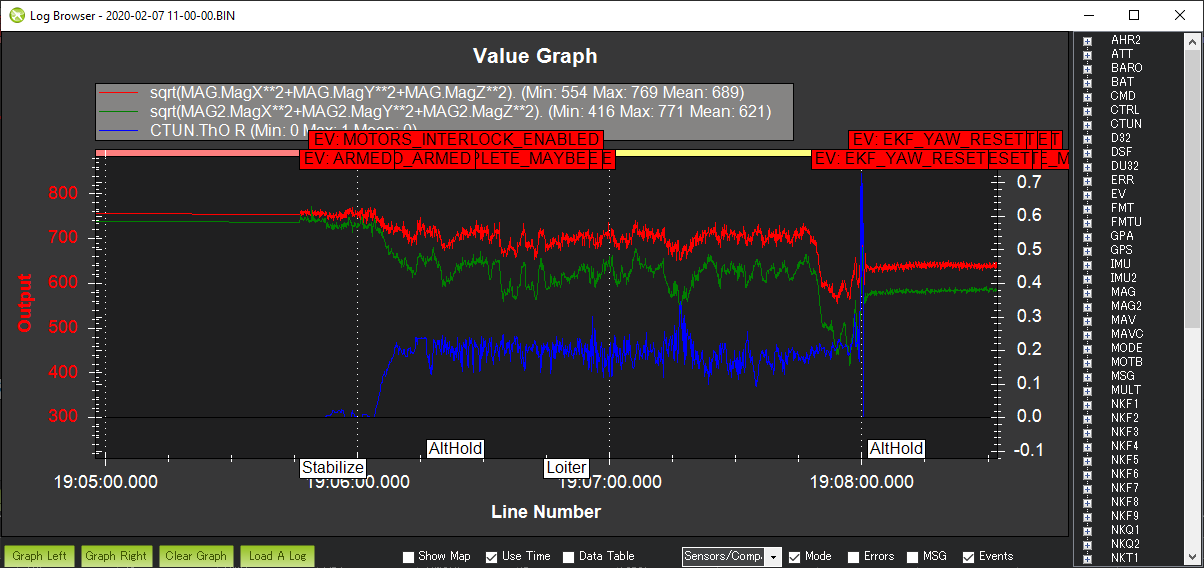
Re the “mini fly away” I think it’s likely because there is no external compass and the internal compasses suffer quite badly from interference from the motors/escs/power wires. We can see this quite clearly by graphing the length of the magnetic field (red and green) vs the throttle (blue). This is leading to bad heading estimates and “yaw resets”.
If MP was used I think you probably would have seen the “EKF” label turn red and double clicking on it would have showed it was unhappy with the compass.
I guess this vehicle has maybe not been flown on Copter-3.6.12 or 4.0.x before? I would just like to try and clarify whether this is likely a setup issue or if there’s a difference between 4.0.2-rc4 and previous versions.
Re being unable to download the beta using MP, I suspect it was caused by a temporary internet outage somewhere but could you tell me which board you are using?
Also if you know which firmware should be loaded on your board (normally it’s similar to the board name) it’s possible to manually download the firmware from firmware.ardupilot.org/Copter/Beta
We’ve tried to reproduce the issue with the CUAVv5+ USB port not working but so far it seems to be working for us. Could you provide a parameter file when it’s working and not working? I know this could be a little tough when it’s not working but perhaps you can get it using the telemetry radio.
Another suggestion from @tridge was that it may be a driver issue on the PC running the ground station so maybe it will help to reinstall MP or perhaps somehow delete the drivers so they are reloaded somehow (sorry, this is really not my area of expertise)
One thing I would very much like to confirm is if this is a regression from stable (aka Copter-4.0.1). Could you try loading Copter-4.0.1 and see if the serial ports appear? Then try loading Copter-4.0.2-rc4 again and confirm it doesn’t work? So far we just can’t imagine which changes between Copter-4.0.1 and 4.0.2-rc4 could be causing this.
I’ve just installed using Beta MP to a Pixhawk1 board (which should be the same) and didn’t have any problems. I think we need to get @meee1 involved because it seems like a Mission Planner issue.
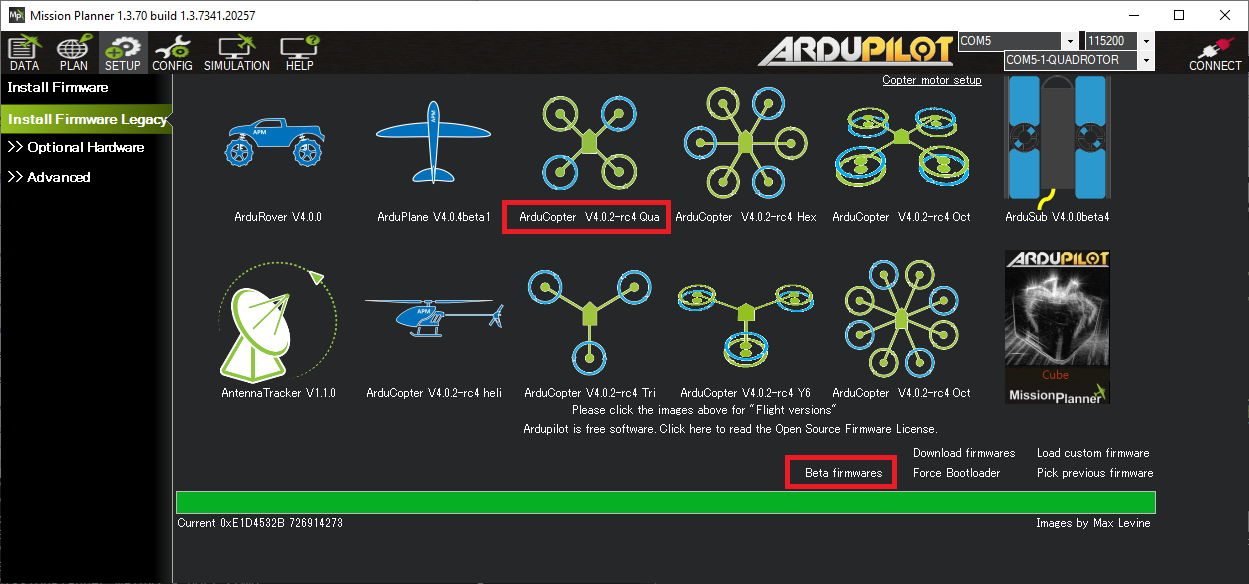
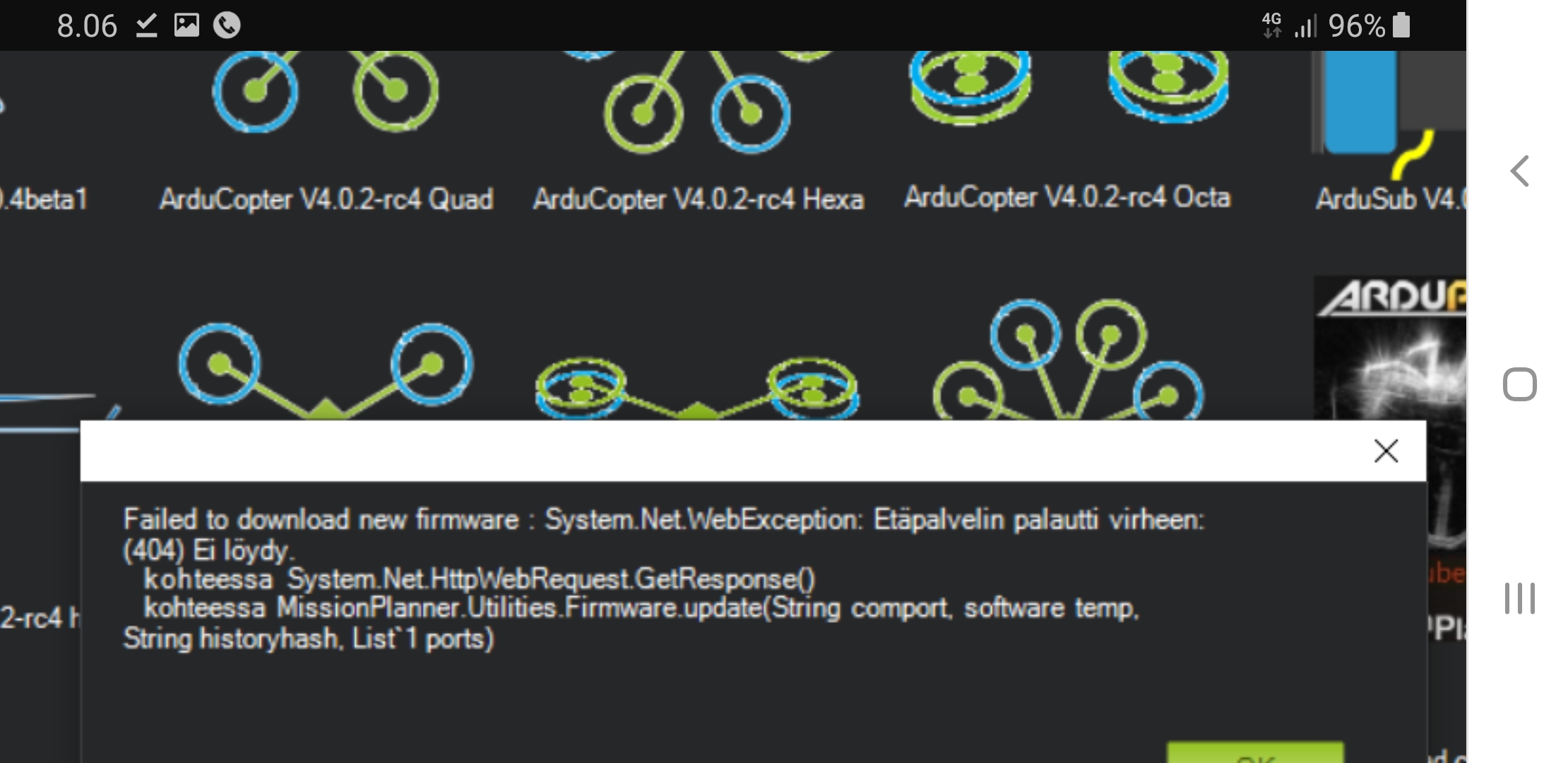
If you’re using the Mission Planner, when you click on the “Beta firmwares” link you see “ArduCopter V4.0.2-rc4 Qua” written below the icon?
Yes I think it was correctly listed, see this image below. I try manual download later in the evening. I havent tried it before that way and need to learn it.
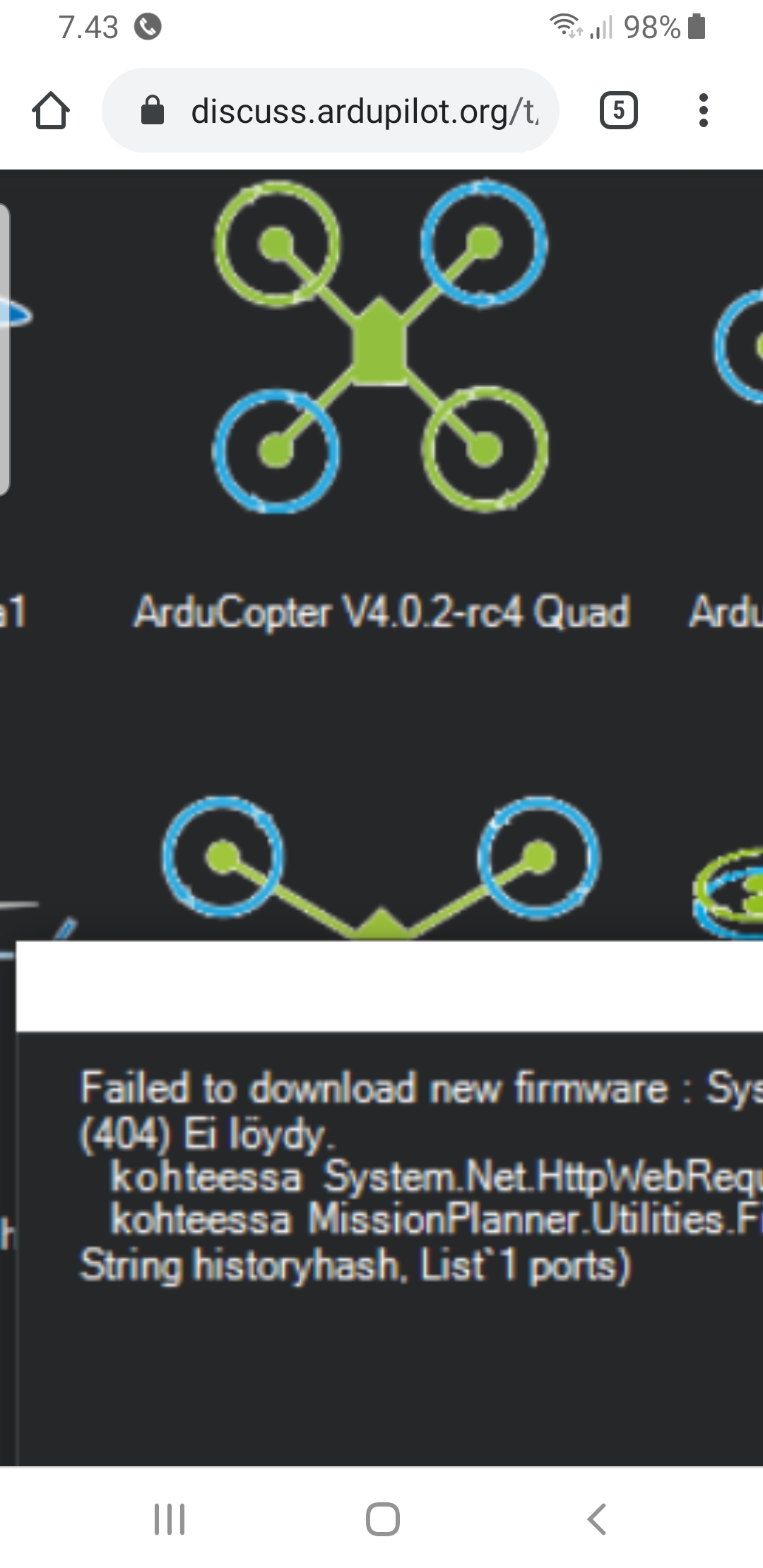
@Henri, thanks. Can you post the rest of the error message box that’s being displayed? This may give some clue as to what is going wrong. In the image above we can see about 1/3rd of it… so just the rest of that would be good.
Here it is. Full screenshot is up there on the original message. One possible thing to rule out came in my mind. I powered board via USB. 4.01 uploaded fine with that but who knows if it is on the limit. It’s easy to rule out by external powering, which I’ll do later today. I have a feeling that I seen such issue a long time ago.
Thanks for the parameter file. I’ll bring this up on the dev call tomorrow because @tridge may have some ideas. If you’ve got the parameter list from the board when it’s not working that would also be good.
I suspect it has something to do with what is written here on the SLCAN Troubleshooting wiki page or maybe the STM F4 SLCAN instructions. Maybe it will be resolved by setting CAN_SLCAN_CPORT = 0 (it’s “1” in your log) and CAN_SLCAN_TIMOUT = 0 (it’s “2” in your log), but this is just a guess.
Isn’t that error indicating that Mission Planner isn’t even downloading the firmware file from the internet to begin with? I suspect this isn’t a problem uploading the firmware to the board at all actually. It’s failing to upload to the board because there isn’t a file to upload. The problem appears to lie in MP not downloading the file, then trying to upload the file it didn’t download… or something like that.
If you can load download the arducopter.apj file manually (right click, save as), then use the load custom firmware function in Mission Planner to flash it to the board, that will confirm. I bet it works!
Installed 4.0.2 rc4 this morning in order to test since weather looked good.
Started with a compass calibration after a steady 13sats lock on default value. My offsets seemed very high but it went through. I reboot and decided to test Autotune first (this is a tested and tuned build since early 3.6), started with my stock tune and switched to Autotune only to start having strong gusts that made me stop it.
For the full couple of minutes i was in the air, everything seemed fine and only when i stopped autotune in the air i noticed a small hickup on my stability and went back flying is really close to how it did before. Landed, checked that i had my old parameters, reboot and remaining flight went perfect.
I noticed that when i was testing non stop YAW while changing altitude in order to check if the Compass would go orange or red (as i had noticed with 3.6.11/12 on this build), everything stayed low and steady. Noticed on logs that i get warning for compass offsets, but not “error” on my screen during flight as in the past.
If we have better weather in the morning i will check circle mode and complete autotune.
I have it enabled so I can access my can devices. However I do have a zubax babel board so I don’t really need it in AP.
I will try another upgrade and get you the parameters file. I will also disable slcan and see if that resolves the issue. Thanks for the continued support
thanks for dealing with the problem and of course thanks for all your work for this great firmware. So please don’t misunderstand my comments.
Then it would have been too late to react because the copter was already flying away. I probably should have just switched back to QHOVER quickly enough?
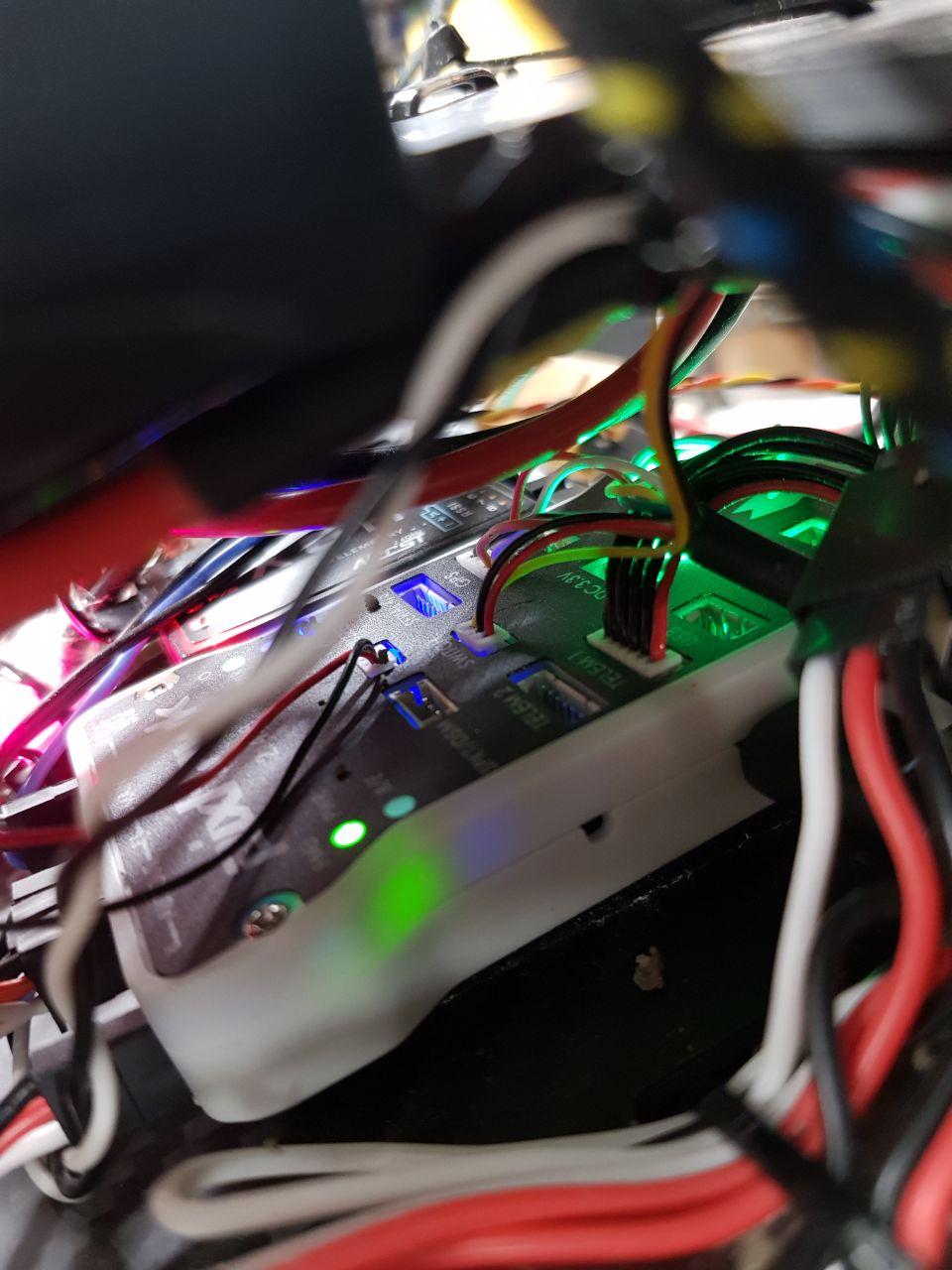
Thanks Randy. The Quad is long been used as a test copter for new firmware or new hardware. Until November 2019, always an external compass on a high-mounted M8N GPS was used. End of November I installed a ZED-F9P (simpleRTK2Blite without compass) with a lightweight helical antenna to test the precision and NTRIP connection (successfully). I thought that it would be no problem to only fly with the two internal compasses of the Pixracer as long as I leave all preflight checks activated. So far, the copter has flown for almost 2 hours without an external compass with 4.0.x firmware without any signs of problems.
I put the log files of these trouble-free flights in this folder Anmelden – MagentaCLOUD
The following 4.0.x firmware was installed:
2020-02-07 (Crash) Version V4.0.2-rc4/Hash a1579554
2020-01-12 Version V4.0.1-rc2/Hash f6121406
2020-01-11 Version V4.0.1-rc2/Hash f6121406
2020-01-05 Version V4.0.1-dev/Hash 1ff07762
2020-01-01 Version V4.0.0/Hash 49693540
2019-12-31 Version V4.0.0/Hash 49693540
2019-12-29 Version V4.0.0-rc5 Hash 1ad27a7b
2019-12-01 Version V4.0.0-rc2/Hash 5701af1a
Maybe that helps a little. But the practical difference was the strong and gusty wind on 2020-02-07 in contrast to all previous flights since november.
In my negligible opinion, i believe in a corner case as cause for the “mini-fly-away”: Compass offset not the best, no external compass, no Compass/Motor Calibration, vibration itself could also be better, Gusty wind. Not a single item alone makes the preflight check negative, but the sum of all of them together can be annoying ?
I will of course mount an external compass and also perform a motor compass calibration, the propellers will be balanced again.