Sorry Randy, but my FC don’t have a flash memory so I have only param file 
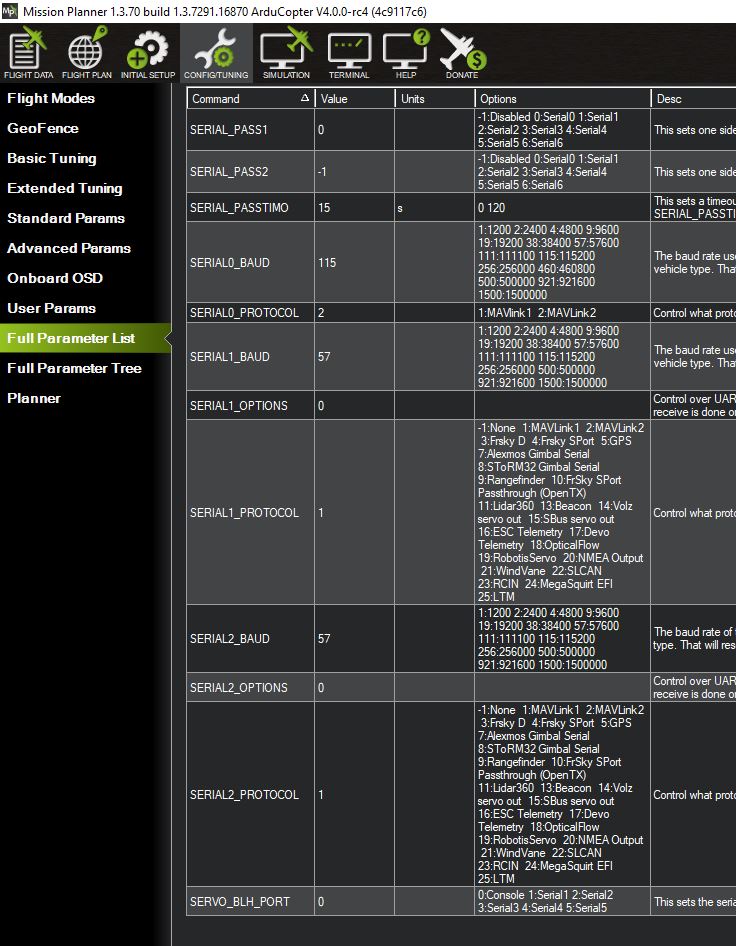
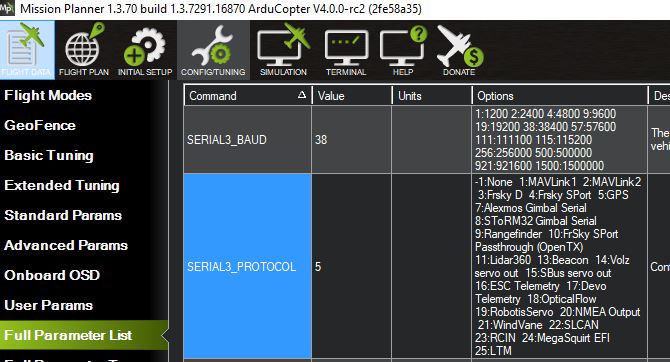
I found that in RC 2 serial 3 is ok but in RC3/4 serial 3 is MISSING!
Sorry Randy, but my FC don’t have a flash memory so I have only param file
I found that in RC 2 serial 3 is ok but in RC3/4 serial 3 is MISSING!
Hello!
Flew on AC4.0.0-rc4, Everything works good. Still trying to get used to new GCS failsafe. XD
Definitely a change from the older versions. Have a look at the wiki page if you haven’t already. In short, it’s behavior and configuration is very similar to the radio failsafes.
https://ardupilot.org/copter/docs/gcs-failsafe.html
hello. when I successfully installed copter 4.00-rc4 on the cube. the cube no longer starts running. Can you help me?
verified that Serial3 is not being enumerated in Omnibusf4 pro on beta Copter…fine on master/beta Plane
Strange - the hwdef.dat between master and 4.0 are identical
yeah…sounds like the tail wagging the dog…
It happened to me as well today. It was an old Cube, had 3.6-dev installed on it, I wanted to compare the compass list with the Orange that’s giving me headaches.
I tried reloading the firmware, just to get the message that it’s already in and nothing is written, and it started working.
Also took 3 restarts after upgrading the bootloader, further on, to start correctly.
FYI the orange has only one compass in it, if that’s what you’re trying to figure out.
Re the compass on CubeOrange, as @Pedals2Paddles says, there’s only one internal compass on the CubeOrange so that’s expected.
In Copter-4.0.x there’s no need to manually set the COMPASS_SCALING parameter(s). These are set automatically during calibration. For Copter-3.6.12 it must be set manually but in Copter-4.0.x it’s automatic.
Re failed compass calibrations, it’s hard to give advice without a tlog but I suspect one or all of these changes will allow to calibration to complete but that the real issue is probably that there’s too much metal near the compasses and the best thing to do is to try and reduce that.
I’ll reply later re FrSky, SERIAL_OPTIONS and DShot600 loggins issues. I’ve personally not used these features so I need to investigate a bit first.
thanks for the testing and reports!
On the MATEK F405-WING board, SERIAL 6 is missing from the Parameter List.
Only serial ports 1 to 5 are listed.
Re the missing serial reports, we’ve found (and fixed) the issue (fix is here). It’s clear we are going to need another release candidate so we plan to release -rc5 on Monday which will include this fix.
thanks very much for finding this and reporting back! Really great.
Thanks for the report. We’ve got a fix for the missing serial6 on the MatekF405-wing board as well and it will also go out on Monday as part of -rc5. Thanks very much!
Re the CubeOrange startup, there are a few possibilities:
Can you try options 1 and 2 and then if that doesn’t work could you provide a video of the flight controller’s LEDs? The GPs/compass unit’s LEDs don’t tell us much but there are some LEDs on the flight controller itself (I think) that tell us the state of the bootup.
I set all the necessary parameters for the compass in the previous version of copter 4.0.0-rc2 and also set the led diodes. before installing copter 4.0.0-rc4 everything worked fine now after several minutes my computer has not detected the orange cube
@Mallikarjun_SE, re the GCS failsafe, please tell me if you find it difficult or annoying. It’s possible that we should disable it by default but I’d like to hear feedback from people…
I would opt for disabling GCS failsafe by default since I can barely see use for it unless you are controlling the drone primarily by a GCS with some long range gear instead of RC.
I am using QGC and Solex as GCS running on an Android device or MP on a laptop, connected over Wifi to an onboard companion computer.
Due to the relative low range of the wifi access point compared to RC there are from time to time connection losses and a GCS failsafe action would be annoying and unnecessary.
thank you Randy!  look forward to the RC 5! the filters on the fw copter 4.0 are very important for small quadcopters like mine (1.9 "props)
look forward to the RC 5! the filters on the fw copter 4.0 are very important for small quadcopters like mine (1.9 "props)
Hey @rmackay9
Yes. Disable by default is good idea.
My telemetry has a Bluetooth module pass-thru and GCS failsafe triggered couple of times in close proximity. I really need GCS failsafe but I don’t want it trigger when there’s good RC connection(probably allow for small LOS radius where GCS failsafe won’t trigger)
But I’m trying to get used to new GCS failsafe method before making a comment. I just get a random thought about fixed wing aircraft where GCS connection loss can be due to orientation of aircraft especially during landing. I wouldn’t like the AP trigger GCS failsafe in such situation.
It really surprised me… I use crossfire, also w/ the bluetooth pass-through. And yes, my first flight w/ it, it started to RTL. But, I didn’t know what was going on, since that has never happened, and I was only about 50 meters away. In my somewhat panicked state, I didn’t realize what was happening, and thought I had lost control of the vehicle. So, I killed the motors.
Luckily it’s a little 3" prop copter, so a fall from 100 meters into grass didn’t cause any damage :).
But, I cannot have that failsafe enabled w/ crossfire.
I brought this up in the crossfire support forum, and bumped it a week later, but no one from TBS acknowledged my post. The issue is definitely that crossfire does not conform to the standards… They only send about 1/4 of the usual telemetry packets/frames (not sure which is correct, but you know what I mean).