Detecting landings is tough but I’m not aware of any software changes that would have affected this so I think it’s environmental.
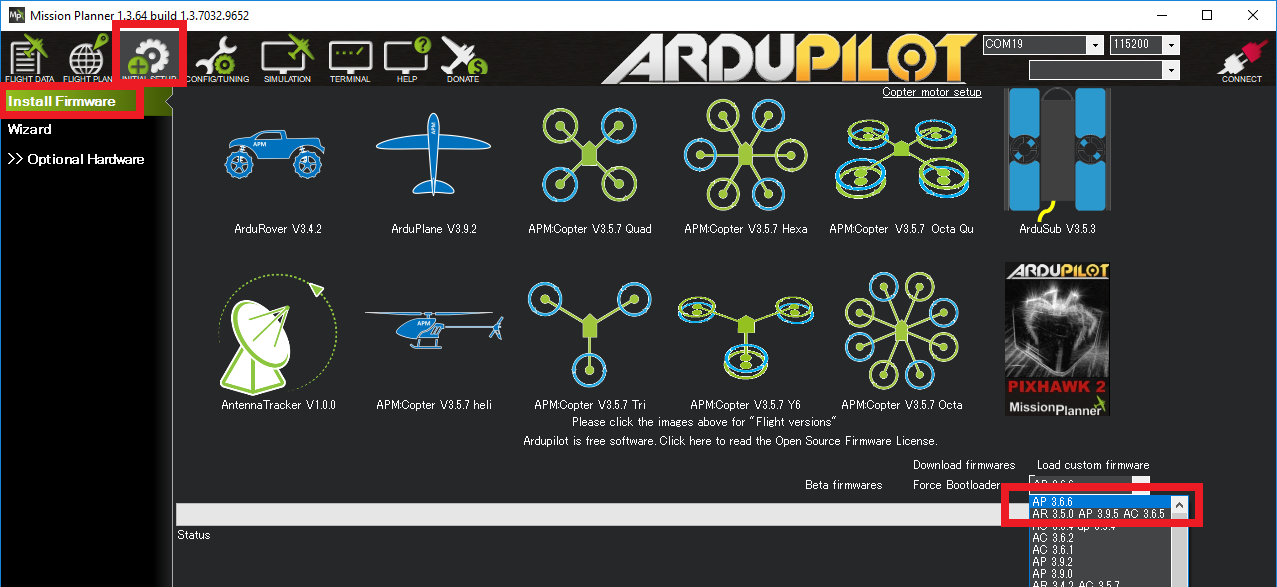
As suggested above, it would be good if people facing trouble did a series of tests with older and newer firmware to show there is or isn’t a difference. Copter-3.6.6 for example is available through the Beta MP’s “Pick Previous Firmware” link. I think the “AP 3.6.6” option is actually Copter 3.6.6. I’ve ping’d Michael Oborne about the typo.
For my little experience everytime i reflash 3.6.7 i restart getting flips on RTL when landing. Maybe just a coincidence but i settled back to 3.6.6 and not a prob anymore.
I have the very similar experience of flipping just after auto-landing using copter 3.6.7.
The large octa-quad we built haven’t had this kind of problem with copter 3.5.7 and 3.6.4.
I hope your team can clear this issue very soon.
Thank you always for your continuous efforts of maintaining ardupilot firmwares.
I’ve heard a few reports like this but as far as I know we haven’t changed anything in this area compared with 3.5.7. Older versions of AP are available, I’m wondering if you would be willing to do some tests with the current and earlier versions to see if there is any difference? I suspect the difference is just environmental and actually not related to the software but I could be wrong of course.
Don’t know if what i experienced could be related to the latest problem on landing. I had a few flips on landing lately and never had any before. For other reasons i dropped one of the 2 gps i had on board on wich i had blemd enabled and all landing probs disapperead.
To me it looked like the Quad kept on try to move even when it was on the ground, as said, removing gps blend cured my prob. Don’t know if it is a coincidence or maybe in some way related.
Thanks for that. It is interesting for sure especially if others can replicate it. The position estimate is certainly important for a good landing. If the position estimate (which comes partially from the GPS) is moving around a lot as the vehicle lands then this could cause the landing detection to fail.
As a side note, my standard development IRIS has two GPSs enabled and I haven’t noticed a problem on landing - but this doesn’t prove or disprove whether two GPSs is related.
Thank you very much for your reply. I tried to find if the landing problem occurs with copter 3.6.2 as well.
I haven’t experienced any landing problems at all with copter 3.6.2. All hardware configurations are the same.
Is there any change in the landing detection algorithm of 3.6.7 version?
After a small hiatus rebuilding for less vibes and stealing a Tallysman GPS RF-end off a derelict A2, I flew a couple of missions today on 3.6.6 and both auto-landings were detected correctly. I’ll try to clock in 4-5 more tomorrow, as the weather forecast looks nice, then come monday I’ll go back to .7
Hi,
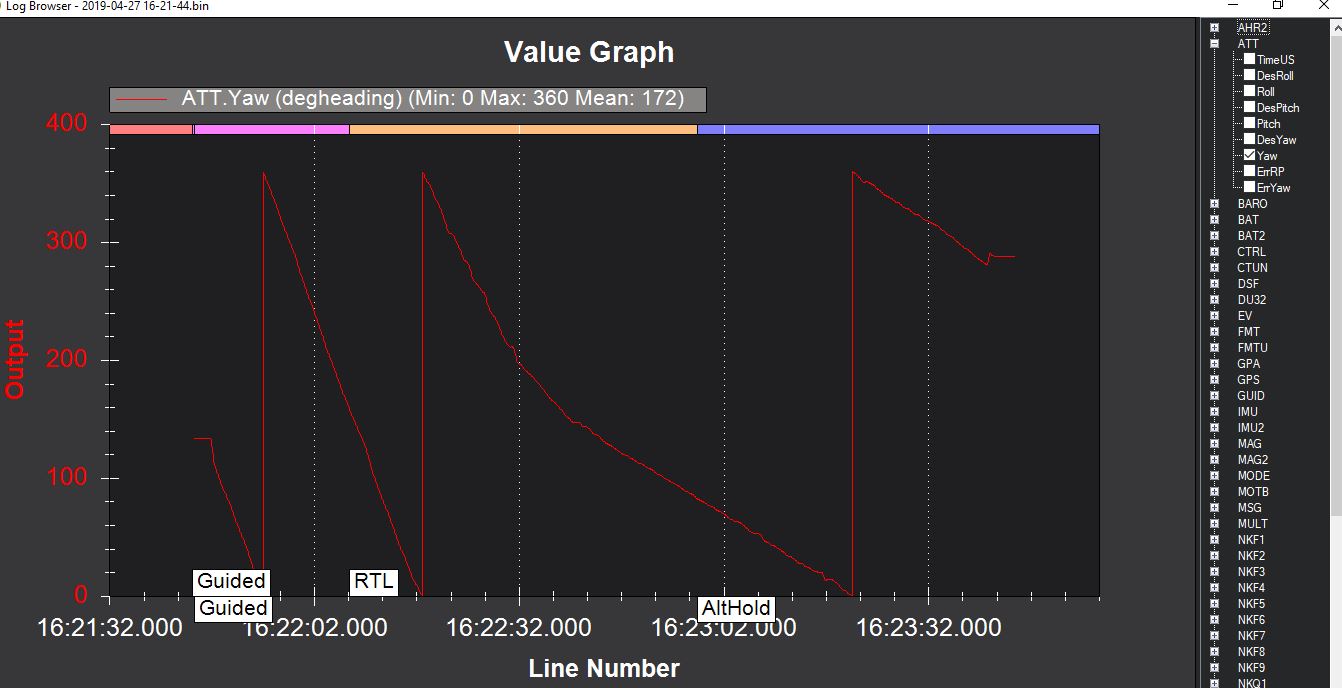
I am using pixhawk 2.4.8 and i had updated my firmware with copter 3.6.7. While flying i faced the issue of continuous yaw movement.Even after switching to RTL, issue continues.I am trying to switch from 3.5.7 to chibios(3.6 +) but none of these updates are as good as 3.5.7. Lots of weird issues occurs due to which again and again i have to switch to 3.5.7.
Attaching the screenshot of log.