I did an outdoor test flight with Copter-3.6.4-rc1 on a Pixracer and the Cheerson CX-OF (without a lidar).
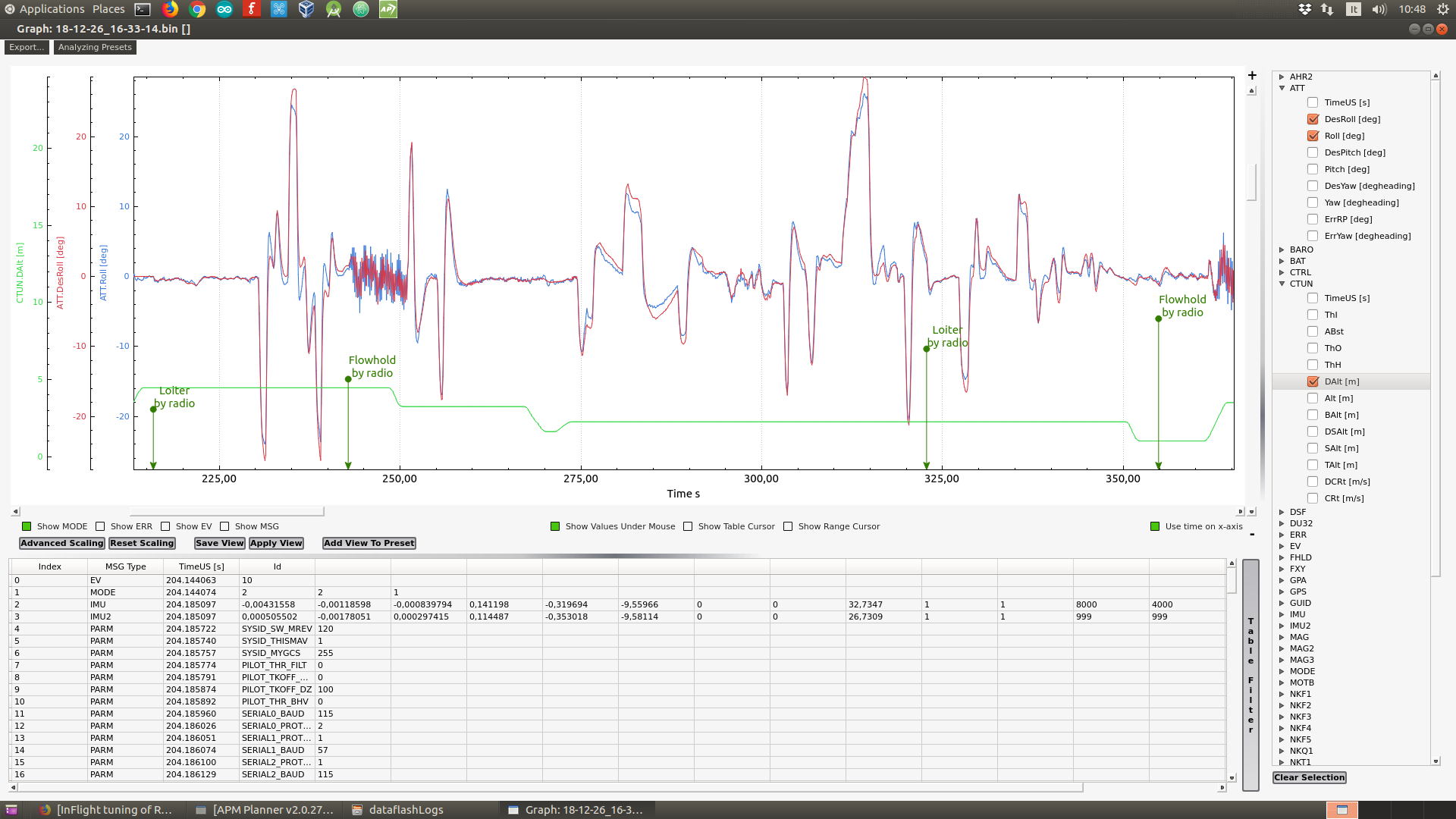
I tested the FlowHold mode with mixed results, when I switch from Loiter to FlowHold I see the Copter oscillate quickly in roll and pitch (like if the Roll / Pitch PID was bad tuned), then if I move the quad a little bit around (with RC) the oscillation disappear and the Copter remain stable.
Another problem is that even if I have the OF message on dataflash log I see all 0 on OPTICAL_FLOW message on Mavlink Inspector (MissionPlanner-1.3.62)
