I have tried this and when I disable them all but the here 2 compass none of them are recognized and the drone won’t arm.
That was a firmware or two ago though so I could try again with 3.6.12 when it’s released
I have tried this and when I disable them all but the here 2 compass none of them are recognized and the drone won’t arm.
That was a firmware or two ago though so I could try again with 3.6.12 when it’s released
I think this is a known outstanding issue. I believe the CAN GPS enumeration has been fixed in 4.0, but I think compass is still being worked on.
@rmackay9 so if using gps on CAN should it be compass_scale3 set to 1.17? Seeing as that is the gps on can?
Also the others are set to 0 in 6.12 should they not be 1.0?
@steve, yes, that’s right. There’s a special check when the scale = 0 that treats it the same as 1.0.
@steve, @Anubis, thanks for the report on the compass consistency check. I wasn’t aware of this or perhaps I’ve just forgotten but in any case, I’ve added it to the Copter-4.0 issues list assuming the issue is still present in 4.0.
@rmackay9 So 6.12 (downloaded off latest MP) has been flying two days with no more compass issues. This has compass scaling for compass 3 at 1.17 using GPS on CAN.
Only issue I keep having is the “imu yaw alignment complete” in flight right at the start. When this comes up if you are moving forward or in any direction it acts as if it has TBE for about 3 seconds then settles out and peforms great for the rest of the flight.
See link for a log
https://drive.google.com/open?id=15szcoqIxKHIebPeo2NyJhMm2VrUdp9_g
Hi,
The default value of ATC_ACCEL_P_MAX is very low (11xxx) and different of ATC_ACCEL_R_MAX. This leads to an awful and weird flight behavior in the initial setup when using the default parameters.
I will post this as an issue in GitHub.
I tested this and COMPASS_USE, USE2 and US3 do work correctly for the compass consistency check
Yes that is the case they have a compass scaling factor in 3.6.12 now where you set compass 3 to 1.17
If you see the the forum for compass scaling I think you will find it
My quad loss altitude and uncontrolled landing after 3.6.12 in auto mission flight !
Any comment ?
Hi @Geopilot,
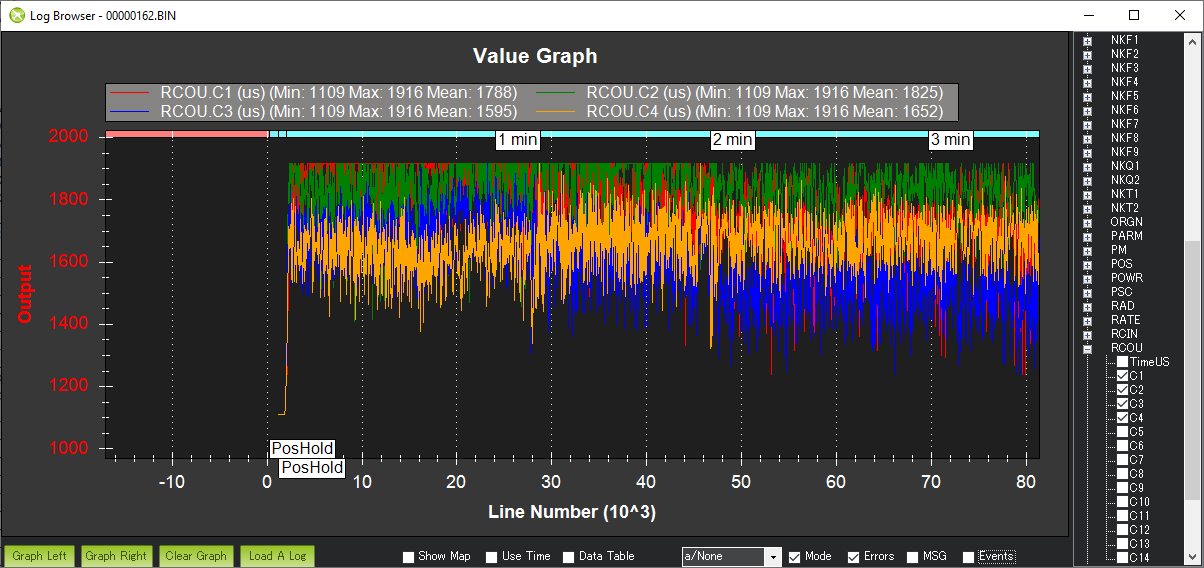
It looks like this vehicle is perhaps quite underpowered which we can see because the hover throttle (see MOT_THST_HOVER parameter) is 0.6875 meaning it’s hovering at 70%. This is not good because it means the vehicle really struggles to maintain it’s altitude and some motors are constantly hitting their upper limits which reduces attitude control performance. Below is a graph of the motor outputs and we can see that motor 1 and 2 are pegged to the top. There’s also quite a large motor imbalance but it’s probably best to address this after the power to weight ratio has been improved.
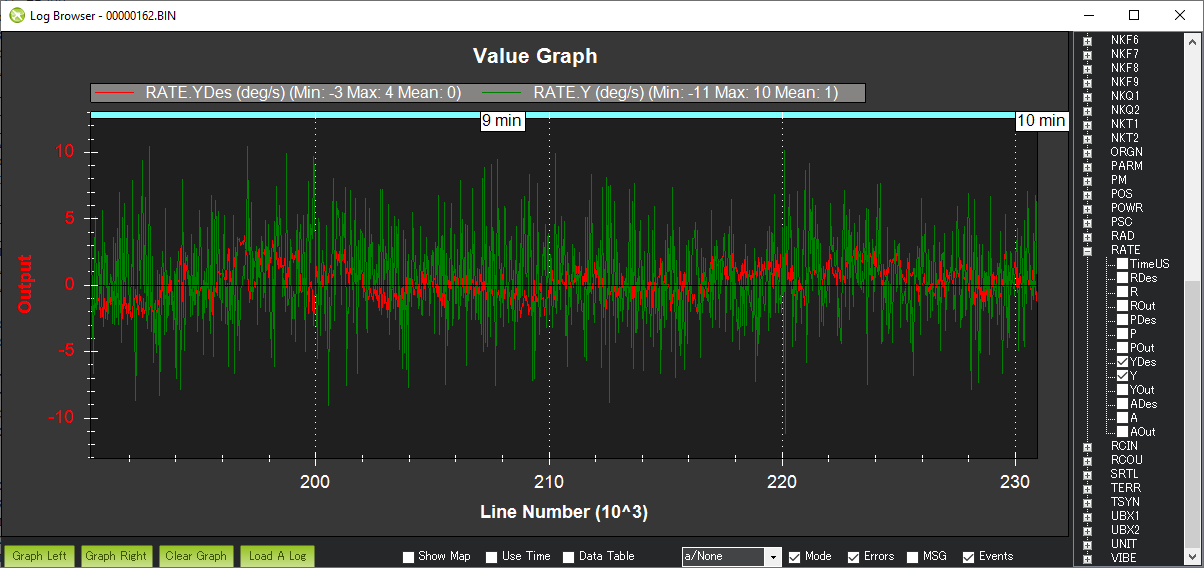
In terms of tuning, I think the yaw rate gains are too high which we can see by looking at the RATE.YDes and RATE.Y. See how the actual yaw (in green) is so much higher than the desired (in red)? I think reducing the ATC_RAT_YAW_P/I from 1.83 to 0.8 would be a good start. I suspect the roll and pitch rate gains are also too high.
Thanks for providing the logs, it really helps with analysis.
Thank you. This gains for 3.6.12 Autotune results.