After update from 3.6.0 to 3.6.1 noting work…
after many attempts I found the problem, with version 3.6.1 the display SSD1306 blocks the telemetry on the usb port making it impossible to communicate with the FC (in my case a mini pix).
Roll back to 3.6.0 and all working fine
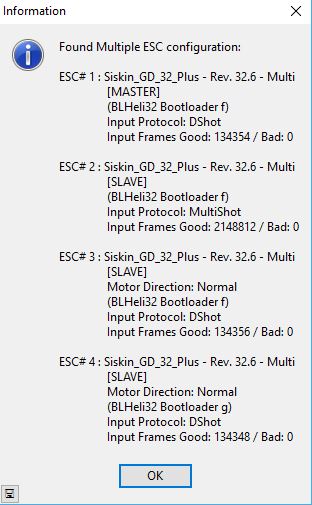
i’m still having issues with Dshot boot up.
It seems that ESCS are booting up sooner then Pixhawk 2.1 and it cant configure the esc to Dshot 150 state.
And MP doesn’t even show anything about it.
I can do takeoff and half of the motor won’t even start…
How to fix it if i see that one of the esc isn’t boot correctly i reboot software way and everything is everytime alright.
Why isn’t there any feedback from the esc that some of them dosen’t work.
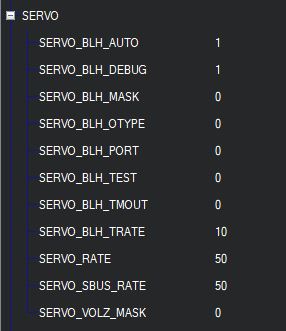
We discussed this with @tridge on the weekly dev call and he says the issue is that the SERVO_BLH_MASK is set incorrectly. On the pixhawk family of flight controllers the DShot ESCs need to be connected to the auxiliary outputs (i.e AUX1 ~ AUX4) but if SERVO_BLH_MASK is 15 this means use the MAINOUT1 ~ 4 (which don’t support DShot actually).
Can’t update correctly with mission planner , so i did it with QGc , but all my parameters were erased.i was not able to connect 3.6.0 to MP under windows , but this one connect!so i guess i have to recalibrate and adjust everything:disappointed_relieved:
I’m really sorry to hear that. Do you have any more details about the series of events that led to the loss of your parameters? Some questions… not trying to give you the 3rd degree of course, just trying to find ways that we could try and reproduce it.
what flight controller was being used?
what version was on the board before?
what version were you trying to update to? 3.6.0? 3.6.1? was it ChibiOS or NuttX?
was any error message displayed when the upload failed?
is it possible that when using QGC another flight stack’s firmware or another vehicle type was accidentally uploaded?
have you had any problems with the SD card or logging before the upload?
Hi, yes i uploaded the wrong firmware… i was using 3.6.0 rc11 with ChibiOS on PX4v2, now with the correct firmware, i am looking for the Vbatt multiplier parameter, and in the failsafe , i can’t adjust the battery level for triggering, they are grayed.Another thing , if i try to upload an older firmware like 3.5.7, my card is not recognized in the process.
No problem with the SD card except sometime “no heart beat” when power on , but not very often.
Thank you for your help.
OK, if you uploaded the wrong firmware (i.e. a different ArduPilot vehicle or non-ardupilot code) then I’m afraid it is expected behaviour that the parameters are wiped.
Re not being able to update the battery level, could you try updating the MP? Go to it’s Help screen, then press the “Check for Updates” button.
i am using 1.3.59 and it says no updates , where is the voltage multiplier parameter for the battery voltage input?BTW , why AC3.5.7 is the latest firmware before 3.6.1, not 3.6.0?
After many testing i found the parameter on QGControler,hopefully i can make a flight test tomorrow.It appears that in MP , i can’t upgrade and rollback anymore, i have to download the firmware separately and use “upload custom firmware”
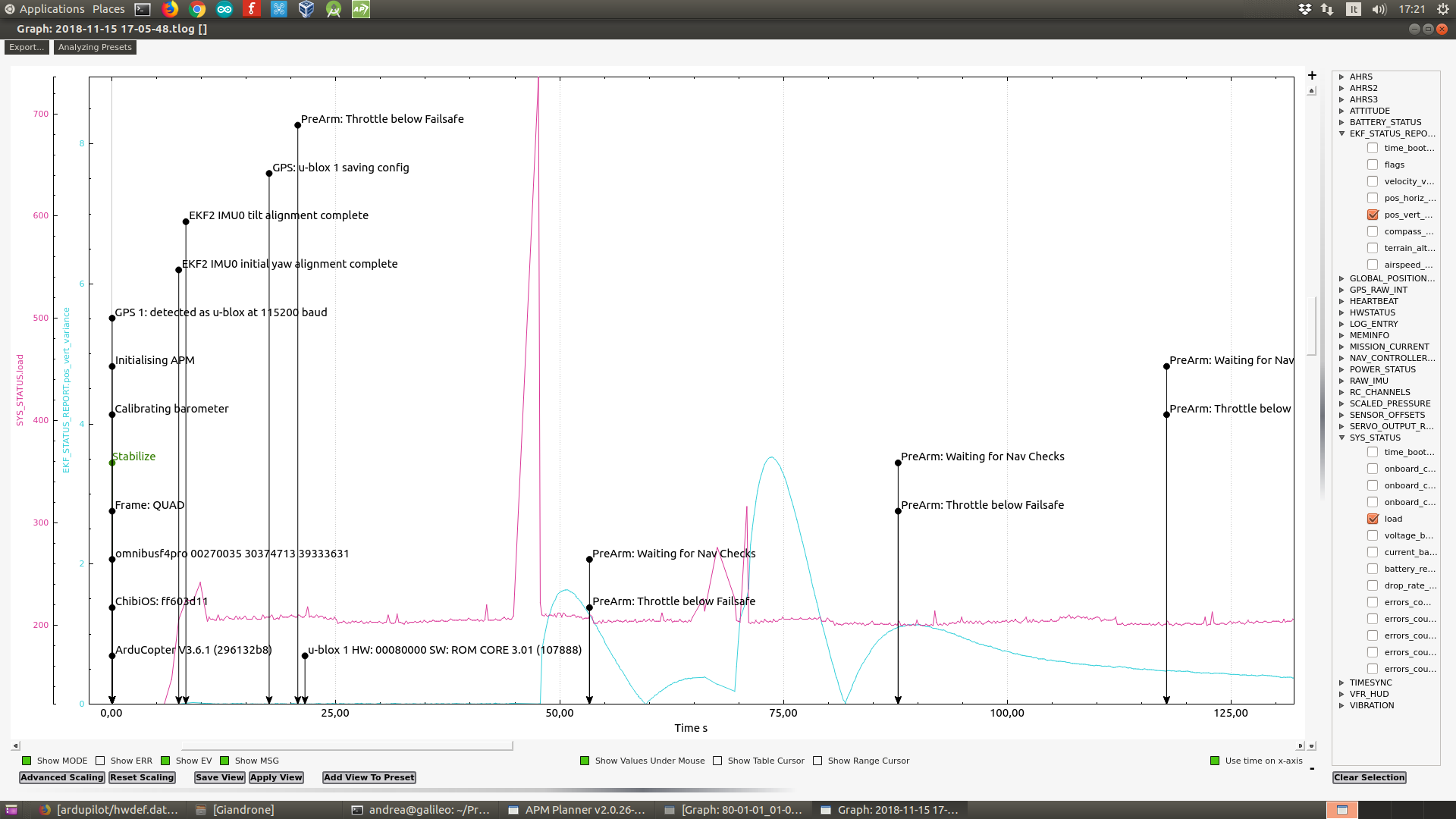
I see something strange with one of my quadcopter with omnibusf4pro and Copter-3.6.1:
on power on sometimes (enough frequently) I see the message “PreArm: Waiting for Nav Checks” and I cannot arms till I reboot (SW or HW). When the boot goes “well” I can fly without problems in manual and autonomous modes.
I attach two plots one from telemetry log and one from dataflash log and the relative .tlog and .bin files
Never got the esc’s to stop beeping I assuming that they need some programing after plugging a 4s they were not happy and gave me a wild Mr Toad ride in the air. I decided to retire the old Simonk ones and order some better esc’s dshots that i normally use then build a bigger frame wonder if some old values where a issue even after wiping the memory card clean. Ardupilot was smart telling me not to fly with the beeps. The FC was used in a large quad with big esc’s or the set of esc’d had two versions of firmware. It would be cool if we could get esc information and program directly without removing the esc’s. Could of been my PDB was touching the frame flew well with the 3s.
Hi David, in my case i was using old esc’s tring to recycle them. turned out i could not even calibrate them so the firmware was right to warn me! I ended up crashing the little y-6 above " my fault " ended up scaling up the y-6 frame to use 10" x 4.5 new esc’s and its almost boring to fly unlike the small frame with 1800 kv’s.
3.6.0 doesn’t appear in the MP’s Previous Firmware link because we neglected to store the binaries before we rolled out 3.6.1. This was a mistake while following our release procedures and we will be more careful going forward.
all the battery parameters should start with BATT_. So the issue may be that the other parameters are hidden until BATT_MONITOR is set to 3 or 4. So maybe first set this parameter then refresh the parameter list. BATT_VOLT_MULT is the parameter to adjust to get the reported voltage to match what an independent voltmeter reports.
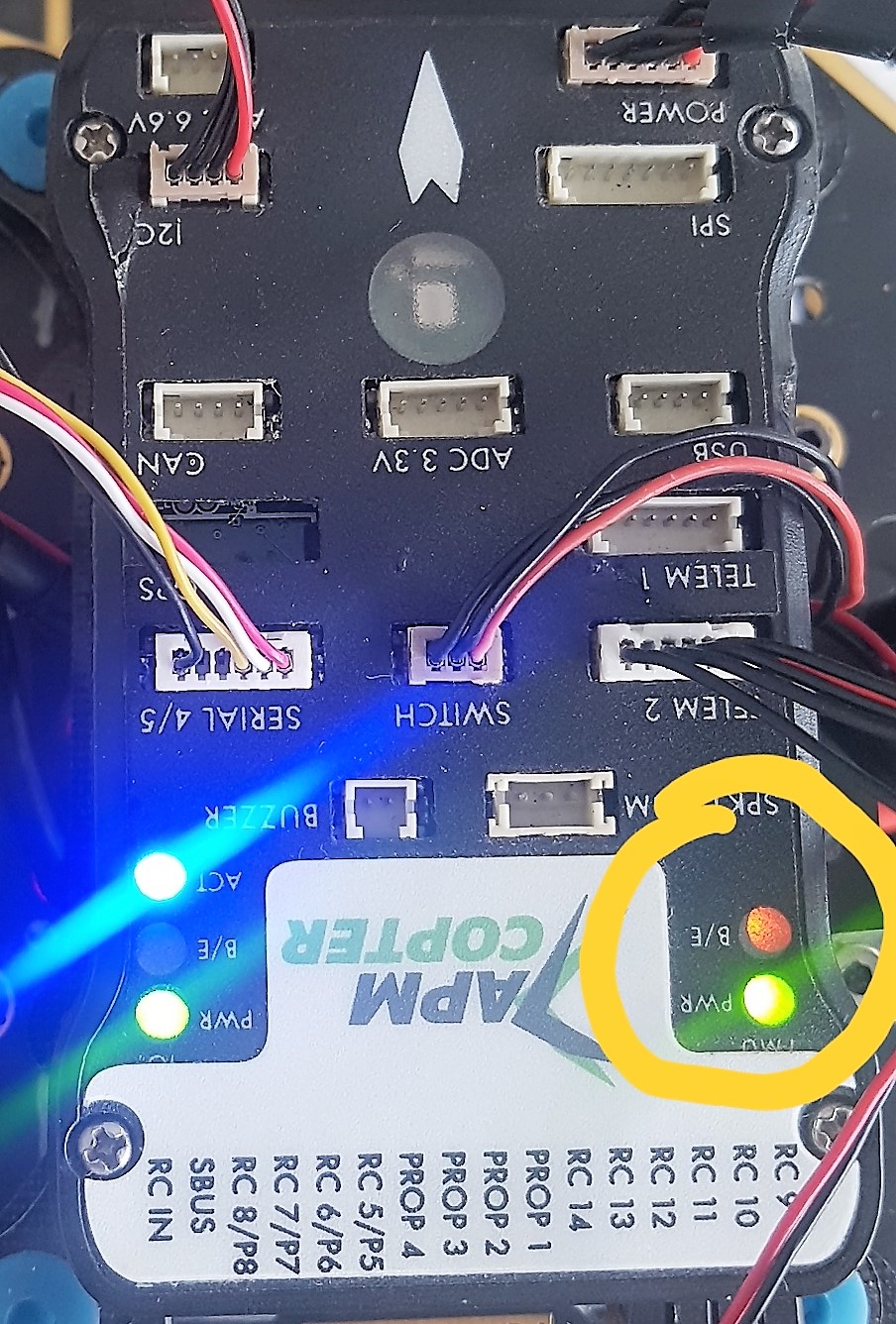
Today I updated my Pixhawk to 3.6.1 Chibios and noticed the orange B/E is on all the time is this a normal behavior with Chibios? Because it wasn’t on Nuttx.
Warning: Be sure, the new PSC_ACCZ_ parameters are set to the correct values when you have changed the old ones (ACCEL_Z_) before.
I updated to 3.6.2-rc3 ChibiOS (traditional helicopter). After the update I compared the values in mission planner to be sure, everything was transferred correctly to the new version. It looked ok, but when I switched to loiter in the air, the helicopter started to perform severe vertical oscillations until I could switch back to stabilize. That was because PSC_ACCZ_P was set back to the default of 0.5. The comparison feature of mission planner didn’t show that, because of the changed name.


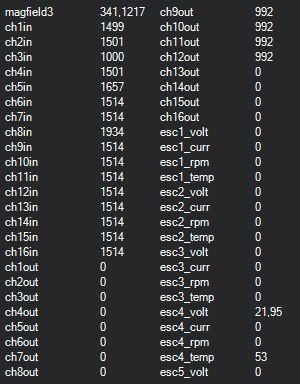 ![esc%20missing|690x321]
![esc%20missing|690x321]