Can you explain what this is? On 3.5.x I have been setting RSSI_CHANNEL to 6 and it seems to work. Is this something different in 3.6? Thanks.
Both of these worked great. On multiple tests, I had the compass_orient set for 38 (solo leg compass). I have a HERE GPS/Compass installed, which requires compass_orient to be set for 0. Compass calibration completed successfully and updated the parameter to 0 in the process.
Tones were all working in ChibiOS as well, including the compass sounds that were not working in -RC6.
2 Likes
I was able to do some testing on one of my bigger quads today and it’s flying perfect on a Pixhawk classic . I using the new w66A WRAITH32 METAL V2 - 32BIT BLHELI ESC at 6 cell and getting a stable position hold like always. Question do i need to use the aux channel out in order to use Dshot like before or can we now use the Main out 1-8? Thanks again for all your impressive work.


1 Like
One thing I am noticing is the external led is red after arming and does not change to green when acquiring GPS. I using GPS blending set to best GPS.
Solved: replaced the led/USB and it worked.
I am using Omnibus F4 V5 (not the pro version). I am not sure if it is intended to incorporate this board into this branch? I thought I would give it a go anyway.
On 3.6.0-rc7 I am unable to arm. I get either ‘pre arm: waiting for Nav Checks’ or ‘bad logging’ messages in mission planner. This happens even if I set ARMING_CHECK = 0. I have also reformatted my SD card and am using a high quality high speed card. My Hdop is low (usually 0.6) and the number of sats is greater than 13.
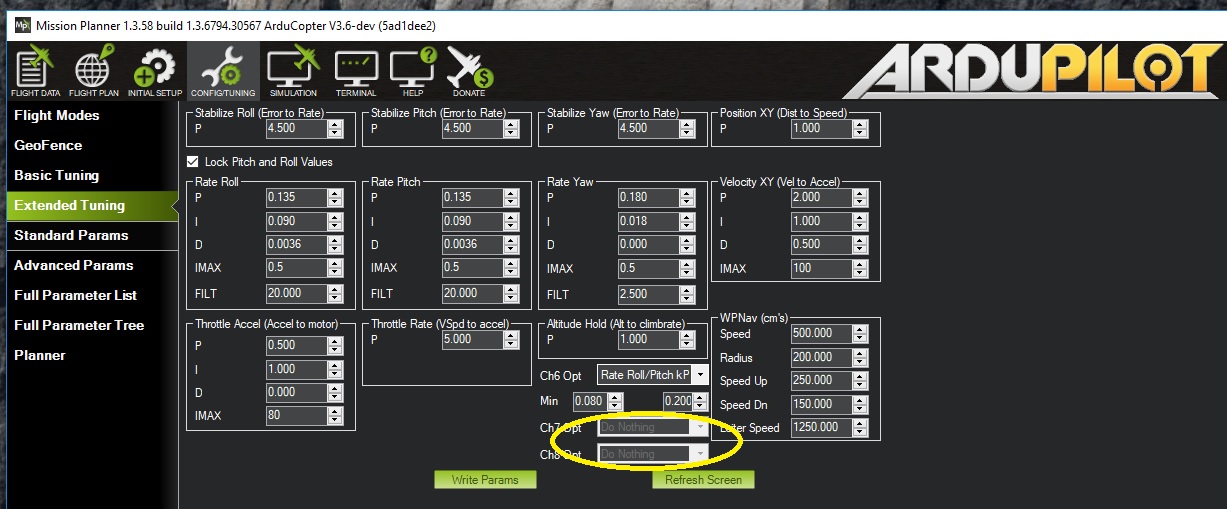
I have flashed 3.6-dev and I don’t have these issues and am able to arm and fly in acro, stabilise, and alt hold. I have other issues on the dev build whereby I cannot change into any flight mode that requires GPS and the CH7_Opt and CH8_Opt are greyed out (however they are available in rc7)
I have re-flashed rc7 and the exact same issues have returned, meaning I cannot arm.
Would anybody be able to shed any light on whether I might be doing something wrong or whether it is in fact an issue with rc7? Thanks.
Problems with SD for omnibusf4pro in 3.6-rc7 are known, there is a commit that solved this in master, now this commit is also in Copter-3.6 branch so next rc will be OK. You can also build from that branch to test.
Which kind of issues do you have that don’t permit you to use flight mode that requires GPS?
1 Like
Thanks for getting back to me Andrea. That is excellent news about the SD logging. I shall have a go at building from the Copter-3.6 branch.
Looking at the error codes in the logs I am getting ‘Bad Variance’ in the EKF/Inertial Nav Check sub-system and ‘EKF Failsafe triggered’ in the EKF/Inertial Nav Failsafe sub system. I can confirm that I am not using a compass and I have switched off compass and mag. I have attached my log if it is of use to you.
edit: apologies my .bin file is on my other computer. Will upload when I get home.
You can try with COMPASS_USE = 0 but MAG_ENABLE = 1, I don’t understand well this but I read it here:
Ah very interesting! I shall try it tonight. Thank you.
Brandon,
I’m afraid that for the foreseeable future, the D-Shot will only work from the auxiliary pins. In case it is of interest, on a Pixhawk/Cube, the “AUX” pins are actually connected to the main CPU while the “MAIN” pins are connected to a separate smaller I/O CPU. To make D-shot work on the “Main” pins we need to improve the firmware on the I/O CPU, it’s possible but I don’t think it’ll get done by the time we release 3.6. It’ll likely happen eventually but just not immediately I think.
1 Like
Brandon, is it possible that there are two LEDs plugged into the same I2C port?
Hi Anthony,
The RC RSSI enhancement is just a small one that allows the RC RSSI PWM signal to be input through one of the AUX OUT pins on a pixhawk. It’s an additional ability though so if you’ve got RSSI coming in through the RC input and that’s working, then there should be no change for you. This feature was added for a user with a slightly unusual setup… I think very few RC systems out there supply the RSSI on a completely separate pin.
Gal,
Really sorry about the ch7/ch8 options disappearing from the MP. This should be fixed now though. If it’s still broken it might help to open the MP’s Flight Data screen, press Ctrl-F and then push the “Param gen” button from the left column, wait about 2 min and then restart the MP.
Solved: Had a bad led/usb unit. replaced it with another one and it works now.
I am having this issue also, I want to disable my compass due to the large amount of magnetic interference on a small frame.
I have found that with COMPASS_USE = 0 but MAG_ENABLE = 1, I can arm and fly in none position hold modes.
With COMPASS_USE = 0 and MAG_ENABLE = 0 I can’t arm in any mode, even with arm checks disabled.
I think its important with a large number of boards without compasses on now being supported that the full capability of Arducopter is available, all be it with more yaw drift than you would get with a compass fitted. I have been reading about abit I think it is just a check that needs to be turned off rather than a fundamental EKF issue, although i’m not too sure.
Thanks
1 Like
@rmackay9 Hi,
Regrettably, it is still the same, nothing changed.
I flashed to today’s fw build.
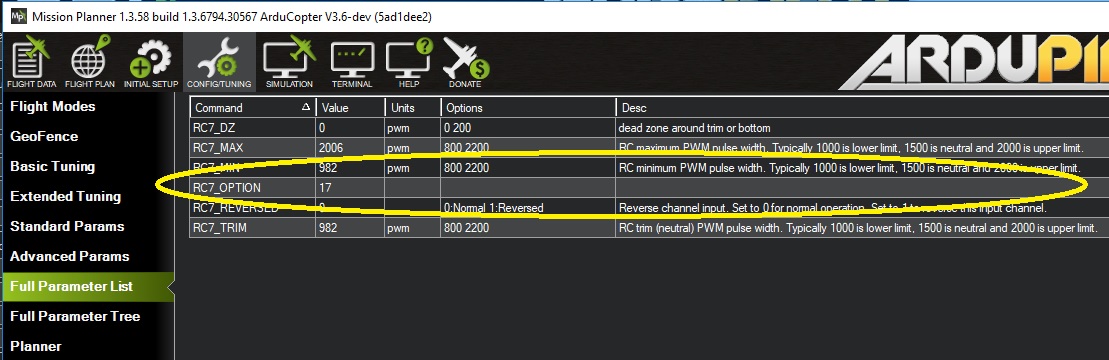
Both Ch7 Opt and Ch8 Opt are grayed out, in full parameters list both Options and Desc field for rc7_option and rc8_option are empty. The Value field was set manually by me.
I did clicked the Param Gen, but it looks like nothing happen.
Thanks,
Gal
ext tuning
ful params list
you could install the beta version of mission planner. it’s working for me.
I am using the latest MP beta.
Anyways, I installed older version of MP 1.3.56 and flashed rc-7 again and now all is correct, voodoo.
Thanks,
Gal
Just received MATEK F405-STD
Flashed the Bootloader with dfu-util under Windows, please note I had to use Zadig to get the device driver being loaded correctly.
Updated to Mission Planner 1.3.58 to be able to flash the arducopter.apj file
I first loaded the latest beta http://firmware.ardupilot.org/Copter/beta/MatekF405/ from aug 9 but the IMU was really misaligned , reverted to aug 2 and could correctly proceed to initial setup
But the Compass is not working…LOL , I jut doubled checked the specs === There is NONE !!!
Looking at the definition , I can use an external on I2C, ok cool , next step …
Now that a page is made for this…
http://ardupilot.org/copter/docs/common-omnibusnanov6.html
Does anyone know if the fourth uart, RX4 on the ESC port, is active for ESC telemetry?