Thanks Randy. That explains.
No need to contact the GPS manufacturer (Drotek)
I have changed my m8n factory settings in order to receive GPS/Glonass and Galileo which provides best performance in my location.
Yes I know that the update rate can drop under 5Hz with this configuration but I never experienced any issues over the past years.
It’s rather the opposite- I get a much better performance under difficult conditions.
Is there a way to disable those enforced checks?
1 Like
Thanks Randy.
It’s not a show stopper so I will wait till the fix is in.
you confuse me slightly with your statement " wrong on ChibiOS for Pixracer (they’re correct for ChibiOS)"
I am assuming you mean Nuttx.
If you get a chance can you peek at one of my logs, just want to know if there is anything lurking in them.
Randy
When you indicate the LED isn’t functioning correctly. Does this fault also apply to the external LED which I notice flashes a different set of colors which too appear to be incorrect…please say yes so I can retain the balance of my hair. lol
thanks for all your assistance. I know this is minor in comparison to the other issues you deal with.
Hi @rickyg32,
Sorry, typo above. The pixracer LEDs are OK on NuttX but messed up on ChibiOS. We missed merging one of the fixes when we were preparing for the 3.6.0 release but we’ve got it ready to go into Cotper-3.6.1 which we think will start beta testing in about a week.
The external LEDs should flash normally. So for example if you connected a Here GPS to a pixracer we think the ToshibaLED on the Here would flash the correct colours. I guess you’ve found that it’s not correct?
Morning Randy.
Hope you are well. Here is the LED sequence I am seeing. I checked again this morning.
Led flashing…Not sure if its a double flash…its pretty fast.
Red Blue flash…I think thats Gyros initializing.
Then double flash yellow which I think is failing the prearm check.
Then mission planner tells me safety switch.
I press it and get a double flashing blue.
I arm and get a solid blue.
I am in the basement so no GPS lock.
So its this double flashing yellow that has me confused. If it failed the prearm then it shouldn’t arm unless the prearm fail is the safety Switch.
I posted logs earlier if you need them.
cheers man
Blue shoud turn green once you get a GPS lock. Yellow I think is the GPS/Compass.
1 Like
Double flashing yellow: Failing pre-arm checks (system refuses to arm).
This is out of the documentation, which is odd since the machine does arm with no issues.
Any one familiar with this error message.
Chibios, Pixracer…Zubax GPS.
Message
bad gps signal health
I have never seen this before. Is it related to the 5hz issue I read earlier in the forum.
I am using double Zubax GPS in blend and never seen this happen but i am still on 3.6 RC12.
Does it happen everytime you boot it or it is random?
Corrado
I have seen it twice now. When it does happen all the messages arrive on the display.
So I was testing the LED so rebooted several times…It happen once today.
Also once yesterday when I was doing the same.
bad ahrs
bad pos variance
bad gps signal health
I think the Bad AHRS and Pos variance are due to the arms being folded and the big magnets on the motors near the gps/compass.
But the signal health…I can’t find that message in anything I have read.
RickyG,
The Bad GPS Signal message probably means that the updates are not arriving at 5hz. From the logs, there’s no GPS signal so it’s a bit hard to be sure what’s happening, any chance you could take it outside?
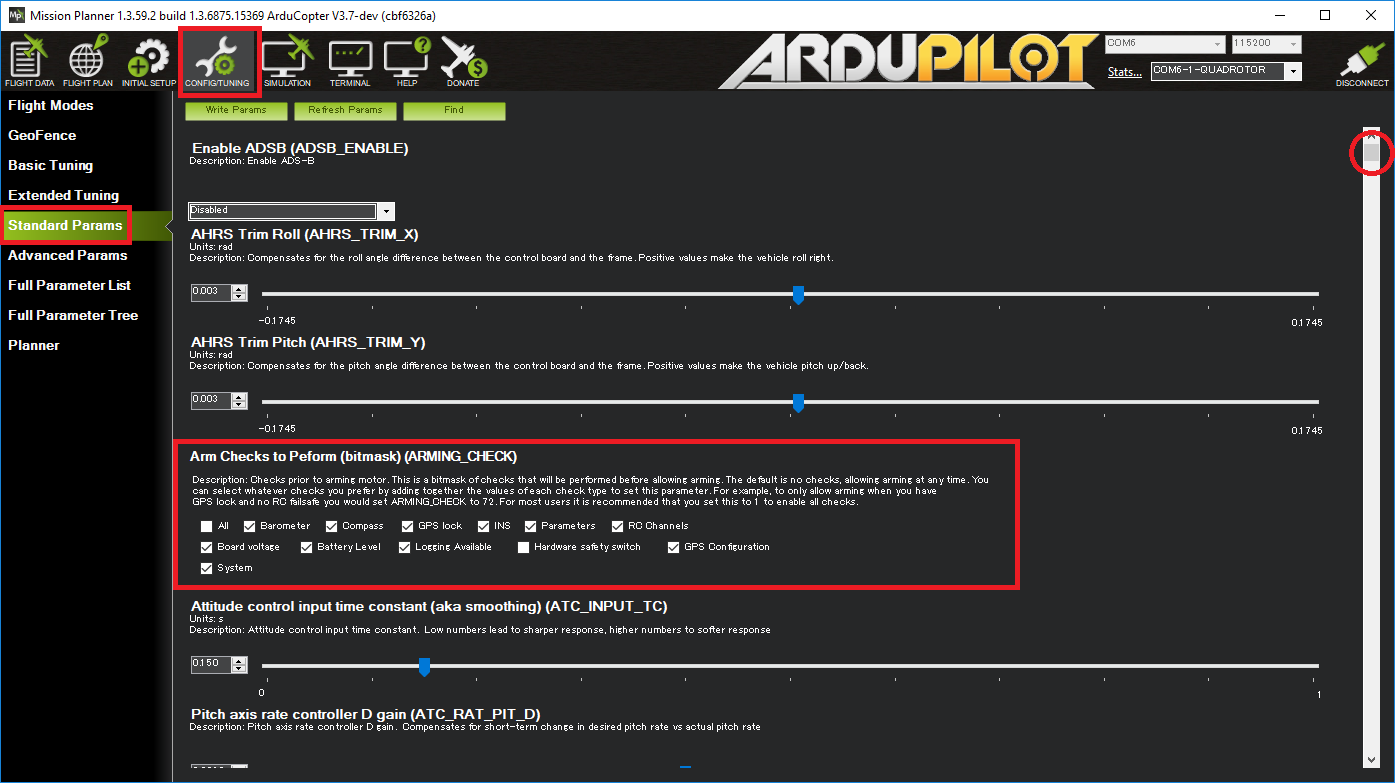
re the flashing yellow LED and the arming switch. 3.6.0 includes a small-ish change to the arming checks so the LED will flash yellow until the safety switch is pressed. If you want the old behaviour from 3.5.7 in which the LEDs would go blue or green even before the safety switch was pressed, you can update the ARMING_CHECK parameter and uncheck “Hardware safety switch”
Re the LEDs flashing speed, in general it should be the same as 3.5.7 although it’s possible it could be a bit faster or slower. I hadn’t noticed personally but we did poke around a bit with the LED code.
The issue with the pixracer LEDs being wrong under ChibiOS is fixed in master now and will go out with 3.6.1.
1 Like
Hey Randy
Again thanks for your assistance.
So the LED flash speed I am not bothered. I suspected the Flashing was pre arm pending the Safety Switch.
I can disable that test so things are as I am use to.
As for the GPS I will see about getting it outside, just the weather has been sucking.
Will give it a try tomorrow.
Thanks again
1 Like
Well after updating from 3.5.7 nutx to 3.6.0 ChibiOS on a old pixhawk
first flight all good no issues second started fine then when nuts a mind of its own
here the logs if you wish to look at but i pull it and now i fitting back the Dji nasa will stick to cubes in my other frames
here is the bin https://drive.google.com/open?id=1pBkJY6xZN_HZBo0FTcz7x7K-ZCKuFbOE
Two white 2.4.8 pixhawk clones updated from 3.5.x Nuttx to 3.6.0 ChibiOS. Both started spewing “No IO Hartbeat” and “Bad Logging” with their respective generic Class 4 SD cards. Solved by replacing them with Class 10 SDs.
1 Like
@yak-54,
Sorry about the crash, hopefully it’s OK.
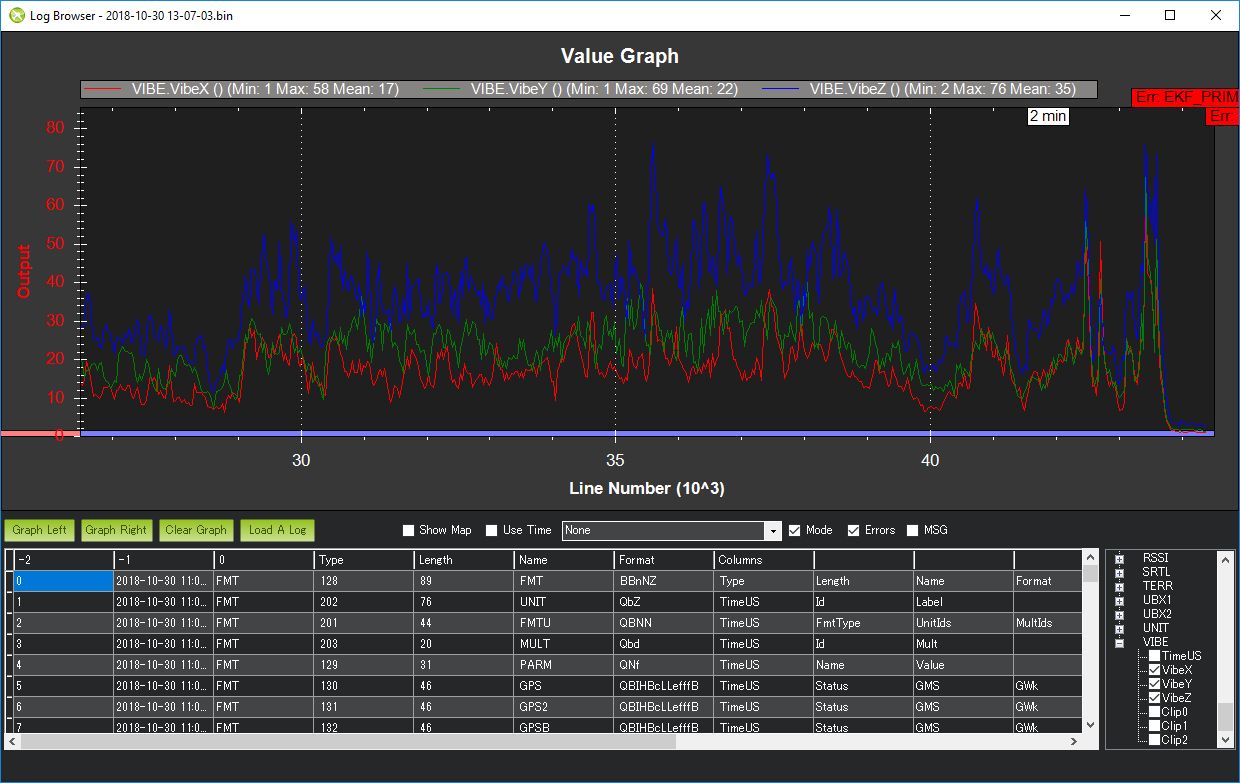
The most obvious problem I see in the logs is the high vibration levels. The z-axis in particular is consistently in the “grey zone” between 30m/s/s and 60m/s/s. At this level the vehicle may fly OK in AltHold, Loiter, etc but it may not especially when stressed (i.e. throttle is increased).
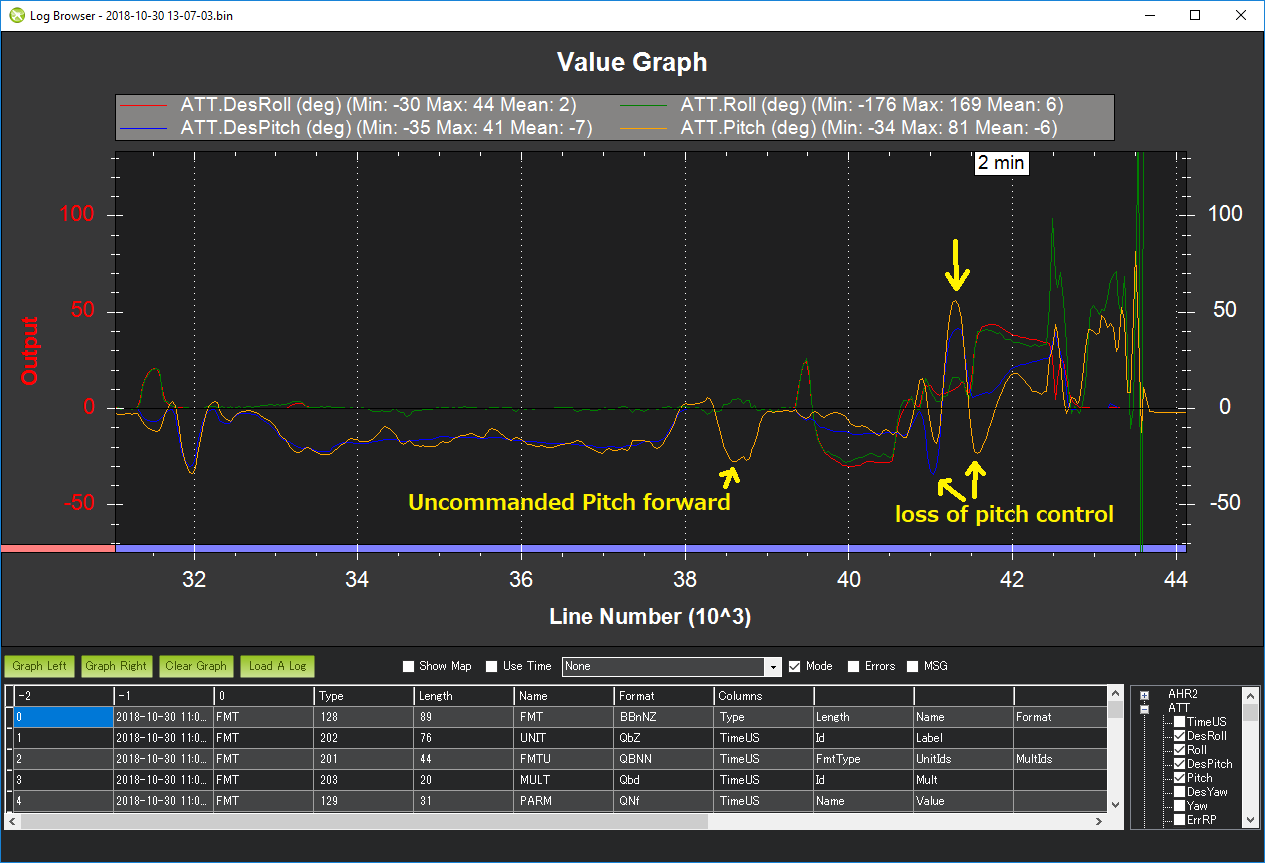
The other (perhaps unrelated) thing though is a loss of pitch control which happens near the end of flight. These are uncommanded changes in pitch so it seems likely to me that there’s an ESC or motor issue. I’d say motor 1 (front right) and motor 4 (back right) are the prime suspects but it’s not a clear-as-day motor failure like we sometimes see. It might be a good idea to re-calibrate the ESCs and use the MP’s motor test screen to ensure the motors are starting at the same throttle level.
Thanks for your time Randy
this happen before bout 3 weeks go
i did see how high z-axis was high so i pull it down and rebuild
new motors new esc new vibration mount and another old pixhawk new props
i think it may be a sink issue with the pixhawk i just played DVD footage and just t the end flight in the audio it sounds like some of esc are beeping
1 Like
@rmackay9 Finally no rain and I can’t reproduce this. I then re-calibrated the compass for good measure and all seemed ok. Still no mag innovations on the second EKF. Log is here https://www.dropbox.com/s/4hulye3j91rwlpi/00000048.BIN?dl=0 This was just a stable hover in poshold in my garden.
Afternoon Randy. Thanks again for your assistance.
I managed to get outside between rain drops today. Much to my pleasant surprise I got a green GPS lock led.
It took about 10 minutes before the GPS started to respond, but it is the first time outside for it.
Also it had just stopped raining and was heavily overcast. No idea if that affects GPS performance. I imagine it does. Heavy water vapor in the air.
I got an HDOP of around 16 and 4 sats.
Here are my observations.
I turned off the safety switch check and that gave me the normal behavior. Green led…happy there.
HDOP 16
4 sats.
Once in a while loss of GPS for a few seconds…
Then unplug and try again.
After I think three attempts I started getting a rash of
Bad AHRS
Vertical position issues.
Bad Logging
Just went crazy…
Unplug and try again.
arm power up all good…
Then the same nuttiness.
Usually after the machine was disarmed, Weird.
Logs…please have a look
1 2018-10-31 1-06-16 PM.bin (46.8 KB)
2018-10-31 13-07-10.bin (391.7 KB)
2018-10-31 13-04-21.bin (287.2 KB)
Hi Andy,
So I had a look at the logs and it looks pretty OK. There’s a GPS glitch at the beginning but it looks “real” in that the GPS is only getting 8 satellites and the hdop is over 2 so it’s just the GPS.
I guess the concern you have is that the 2nd EKF isn’t showing any mag innovations (i.e. XKF3.IMX, IMY, IMZ are all zero). I can ask @priseborough if he has an opinion but to be upfront and clear, we have a bit of an EKF manpower / funding issue. I’m actively looking for an EKF co-maintainer and we have a lot of enthusiasm from a few people but it will take time for them to come up to speed.
I guess the vehicle seems to be flying OK and if there are issues, I’d recommend switching back to EKF2 which is missing a few esoteric features but is very stable and proven.
Txs for the logs. So the GPS doesn’t seem to be doing very well. 4 satellites is far too few. Normally at least 12 satellites is a good number.
I guess this is a UAVCAN GPS? Perhaps the Zubax GNSS V2? There are two bad things I see:
- it’s updating at 10hz instead of 5hz (i.e. too fast)
- the logs are short but the PM message shows bad loop timing. We’ve got one report of timing issues when using the Zubax GNSS V2 with NuttX but I see you’re using ChibiOS… could you produce a longer log so we can see better if the timing issues persist? At least 3 minutes of logs would be nice to have. you can set LOG_DISARMED = 1 to save yourself from having to arm the vehicle.