Pixracer clone on Y6B. LEDs working. Had to disable compass3 - no way to caibrate it.
Flies as good as with 3.4 in Stabilize, Alt hold, Pos Hold, Loiter, Land.
Battery FS (Land) works.
Yaw control is difficult to tune - with all props same size (14") it´s nearly impossible.
Now using 13" Top / 14" bottom and yaw works much better.
Connected a 600 mW Radio to Telem2 caused strong jitter in vcc and made Baro signal unusable. Funny: Connecting to Tower while flying in Alt Hold made the copter dropping 10m.
Now using a 100 mW Module - better, but vcc still not perfect.
Will try mission flying when wind calms down.
Artemen, I just answered you in the other thread but in any case, there’s nothing special you need to do to enable the Pixracer LEDs. Just load the board with AC3.5-rc1 which is available through the ground stations (MP and QGC). With MP there’s a “Beta firmwares” link on the “Install Firmware” page. I’ve just double checked and the LEDs work.
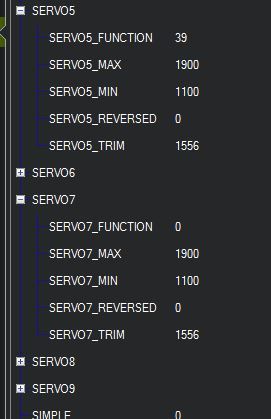
loaded AC3.5rc1 on auav made pixracer on a Y3 frame, I have servo5 function as 39 (remapped servo7 due to max 6 outputs on pixracer)
at first boot after loading, rc5 went to extreme and burned servo BEC (3Amp) servo I think is fine.
please review either remapped servo PWM frequency or correct servo limit transfer.
p.s. after checking servo limits, servo7 limits had generic values 2018max, 1555min, trim1556 when in my AC3.4.4 it was max1900, min1100, trim1556.
arteman,
Ok, sorry for the troubles. It sounds like we’re not limiting the servo output correctly and that’s very possible because we’ve made some quite large changes in that area of the code. I’ll look into this now, sorry about the BEC!
no biggie, I make them myself, its a $0.70 part will replace it tonight…
pcb is my design/assmbly if you want I can mail you one just like this to make testing tri code easier makes tricopter wiring/building so much easier.
I’ve looked at the yaw servo output for tricopters and one change that’s definitely happened (which is not documented) is that the yaw servo output range parameters have changed and we don’t automatically migrate the values across. I suspect the reason we don’t migrate them is because we are already migrating across the RCX_MIN, MAX, TRIM, REV values… maybe we need to do some more complex migration code…
before -> after
MOT_YAW_SV_MIN -> SERVO7_MIN
MOT_YAW_SV_MAX -> SERVO7_MAX
MOT_YAW_SV_TRIM -> SERVO7_TRIM
MOT_YAW_SV_REV -> SERVO7_REVERSED
The example above shows SERVO7_xxxx as the “after”. In your case where you’ve had to move it to output channel 5 it would be SERVO5_xxxx.
it could also be the reason for the less accurate yaw compared to 3.4 Sometimes heading changing about 10°.
or it could be that with 3.5 my AUAV-X2 only works with one IMU?
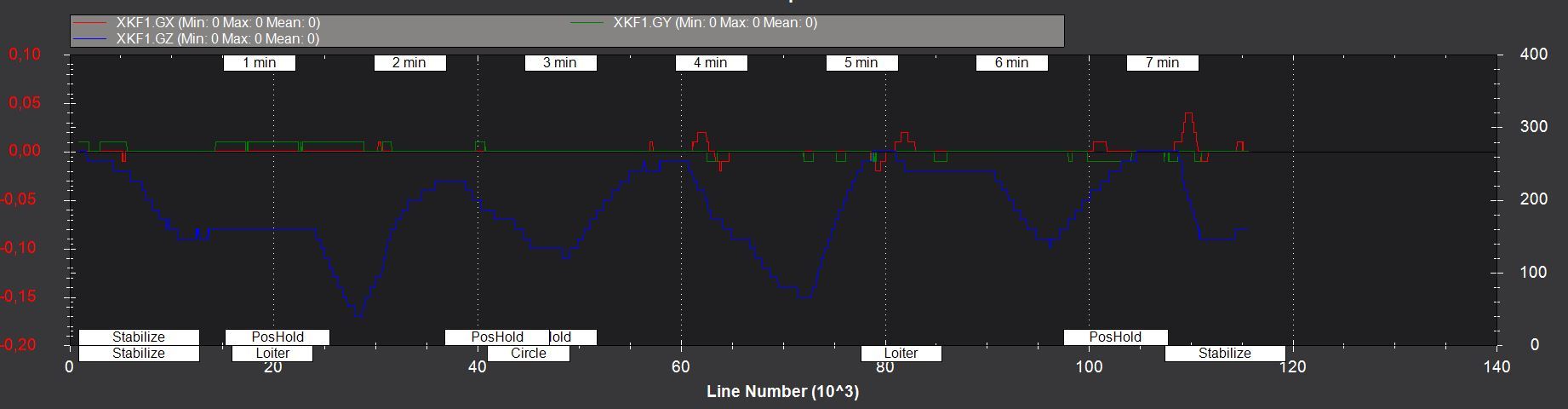
@rmackay9 Very strange behaviour happenned today on 2 differents of my copter (X4 - PH2.1) running 3.5rc1… In Alt Hold or Loiter flight mode, motor 3 (on both copter) would stops/almost stops for no reason for a very short time (<0.5sec) then starts again… We can see in the log below that Roll/Pitch have huge variations with DesRoll/DesPitch at 2 differents time before I put it down (nothing broken alleluia).
However RCOU.C3 output remains normal. Since Motor 3 failed a bit, copter was falling nose down on its left. To maintain attitude we can see that RCOU.C2 and C4 decreases a bit…
I though of ESC failure at first, because I managed to reproduce it twice with each copter before downgrading to 3.4.5 but I flew both copters (2x PH2.1) perfectly after switching back to 3.4.5.
Look like a servo output error maybe as on some other post …?
It’s very strange because and i have 2 others copter flying for 10+ days perfectly on 3.5rc1 (PH1 and PH2.1)
Is it possible than some hidden parameters are not reset correctly in the eeprom when switch form a custom 3.5rc1 to the official 3.5rc1 , or from 3.4.5 to 3.5 and mess things up ? I usually do a reset to default after flashing but we never know…

 will replace it tonight…
will replace it tonight… makes tricopter wiring/building so much easier.
makes tricopter wiring/building so much easier.