@Rolf (& others), Tridge and Peter Barker resolved the the Pixracer ESP wifi issue today so parameters load at the normal (fast-ish) speed. This will go out with AC3.5-rc2 which I hope to push out soon. The only final hold-up on -rc2 is I’d like to include the GPS blending but that needs just a touch more code review. If it takes too long then I’ll just release -rc2 without the blending.
I can confirm that the parameters load normally with PixRacer with today’s master.
Thanks Randy, Tridge and Peter for solving the issue.
Hi,
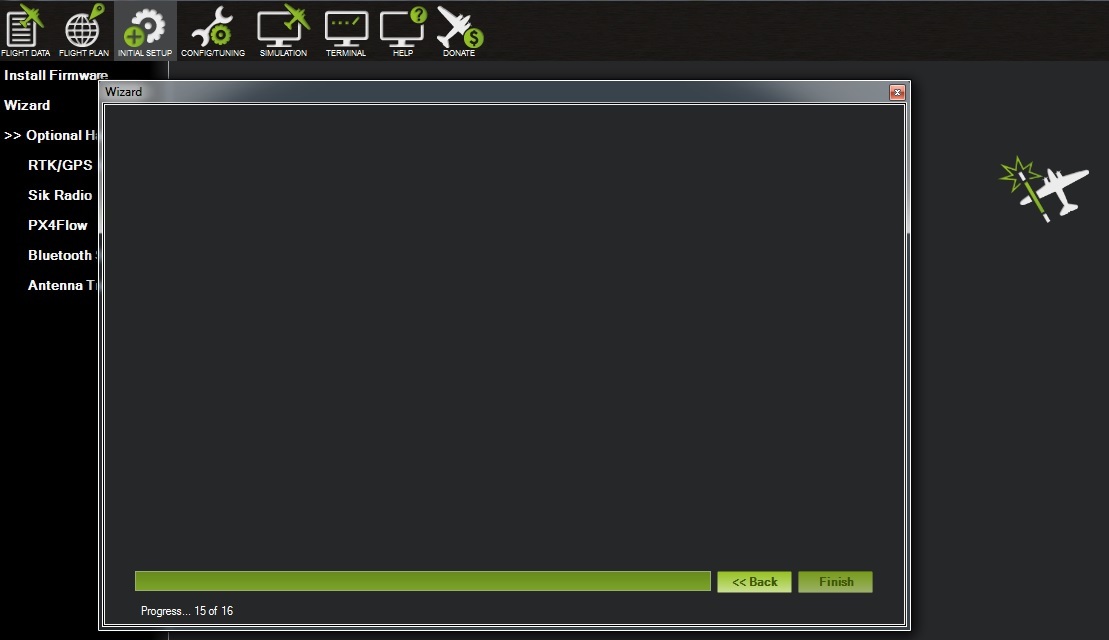
I am unable to finish the wizard no matter what I do. Stuck at Step 15 of 16. if I click finish, nothing happens. I can go back a step. If I use the window “x” the window sill doesn’t closes.
MP running on Windows 10.
So I have a pixhawk that has bin fine I just uploaded the new version of mission planner and updated to firmware 3.5.1 (8ab1b3eb) I calibrated the mandatory hardware. I’m running a ecternal compass along with the internal one. I have ran the calibration for Compass sever times now. I keep getting a pre arm rc yaw not calibrated. What is going on? I have it connected by USB
hi,rmackay9,
Do you konw how the IMU&GPS offset works?I can’t find them in ardupilot.
thanks.
Hi @475241512,
Here’s the wiki page with the IMU, GPS, etc offset info: http://ardupilot.org/copter/docs/common-sensor-offset-compensation.html
Charles,
Sorry for the slow reply, that means the transmitter/receiver (aka RC) hasn’t been calibrated. Sometimes, in vary rare cases, the transmitter/receiver produces values that exactly match our default values and so we get a false pre-arm check error. In these cases you should manually adjust RC4_MIN, RC4_MAX, RC4_TRIM just a touch. set the values 1 higher or lower than they currently show in your vehicle’s full parameter list.
Hi, I’m just a beginner. Just wondering how you connect the frsky r-xsr receiver to the pixracer? Thanks for your support.