Hi Mike, Dave,
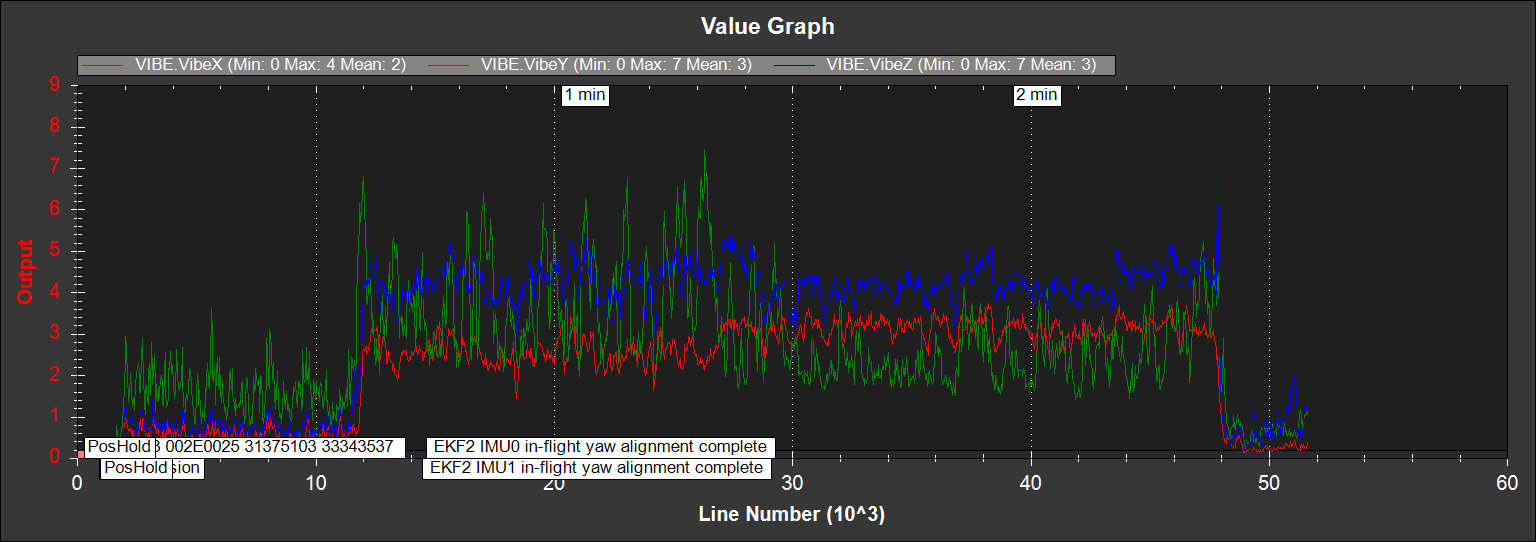
Thanks for your inputs. I’m surprised you say vibrations are high. I’ve been following the copter docs and according to the measuring vibrations page, a plot of VibeX, Y and Z should reveal vibration problems. It says values less than 60m/s/s are acceptable. I have attached the vibrations plot for this log here, and the vibe levels seem very low, or am I seeing something wrong here?
Also, an auto analysis of the logs reveals that motor 3 and 4 always seem to be running slower, and the analysis flags a motor imbalance warning:
Log File C:\Users\DCE\AppData\Local\Temp\tmpF22C.tmp.log
Size (kb) 4429.240234375
No of lines 51643
Duration 0:02:38
Vehicletype ArduCopter
Firmware Version V3.5.5
Firmware Hash 27229c83
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (9.03%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.28, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = WARN - Motor channel averages = [1481, 1440, 1394, 1354]
Average motor output = 1417
Difference between min and max motor averages = 127
Test: NaNs = GOOD -
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘THR_MIN’ not found
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = GOOD -
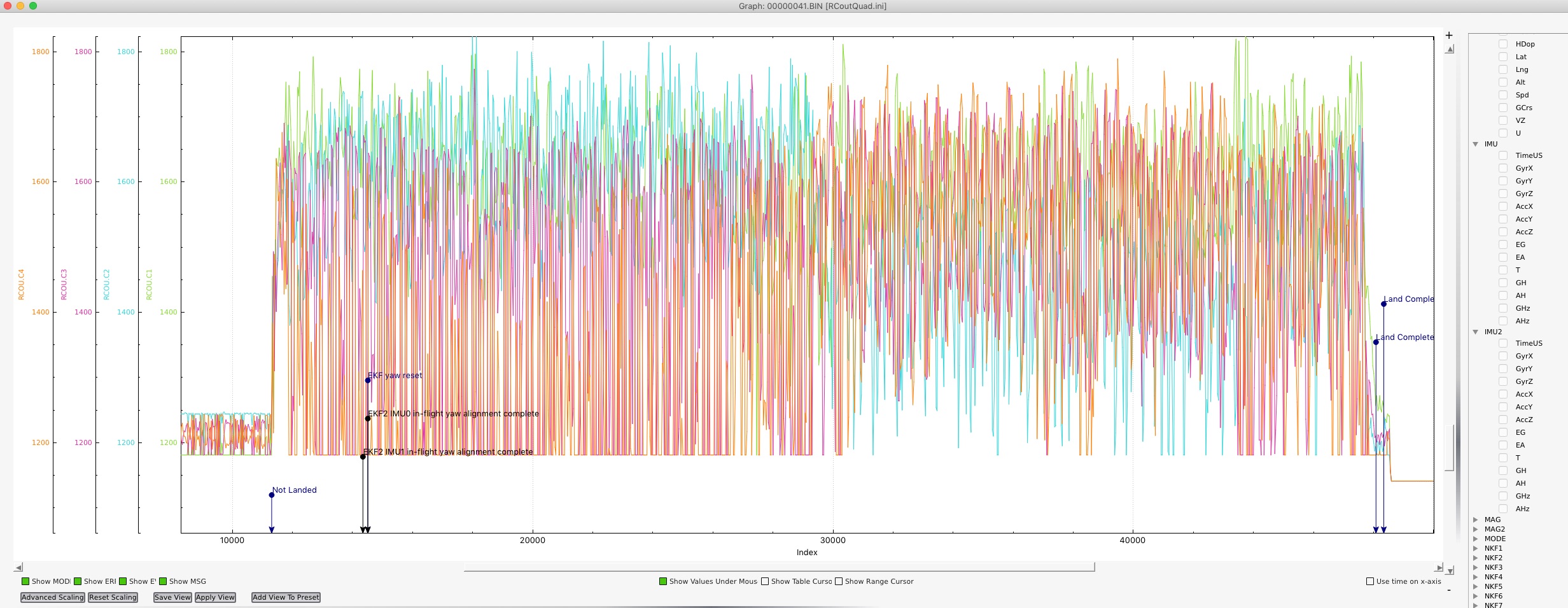
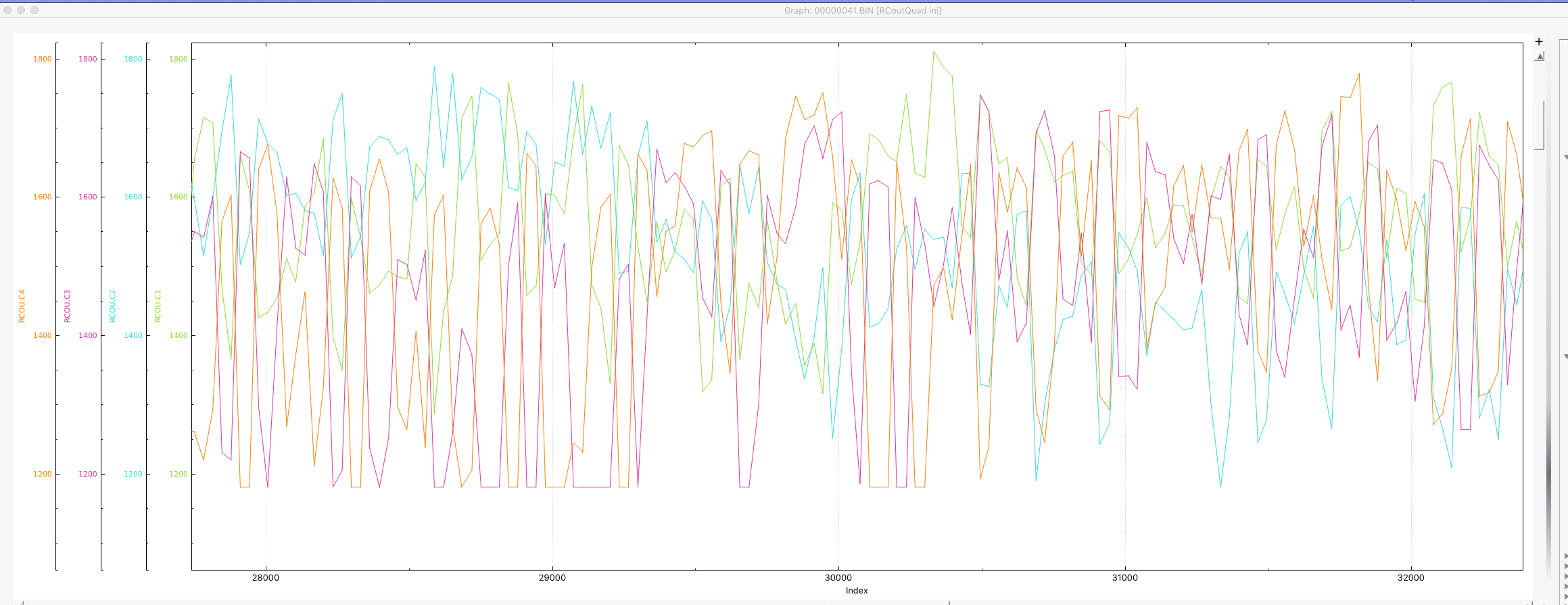
From what I read, this could be because of a slight miss alignment of the motors, or ES calib. The ESC’s have all been calibrated together and seem to run fine and in sync unload. The Pulsing effect also is most visible in motors 3 and 4, according to the RCOUT plot.
The quad weighs about 1.8kgs, and has 400 KV motors spinning 13" props running on 5S batteries. It has not been autotuned but been manually tuned. I’ve used arducopter for a number of years now. I will autotune now only if I have more clarity on the vibration levels and why the motors are imbalanced.
Dave, what filter settings should I look at?