I scrolled through the forum but i was not able to find the reasson for the problem i am having.
I am using an Emlid Edge that has the 3.5.5 code and i have had twice the same issue.
Its a 1100 Octa from Aeronavics that has Dualsky motor and ESC with CamCarbon Aeronaut propellers.
First time was Autotune and since i saw battery finishing before autotune i decided to cut it short and land. On touchdown it simply flipped and went full power.
After that i tuned the Octa on a jig and decided to test PID (as it seems on the log P&R seem to be pretty close) but once again on landing i had the same thing. Touch down, motors dont stop, gradually start leaning to one side…flip. I am uploading both logs and would appreciate any help.
Here is a Dropbox link to the folder that has both logs. 24th was the autotune and today Nov1st is the new one.(YAW PID is not set yet) https://www.dropbox.com/sh/xb1d7lmadvcwkpe/AABCZaPyWpUI4CRBAxwFzh5Ka?dl=0
FYI - I’ve moved this to the Copter-3.5 category because it was “Blog” which made it appear on the front page of ardupilot.org.
I don’t see the logs yet… at a high level the issue is that the vehicle is not detecting the landing… there can be a number of reasons why that can happen but a log is probably the best way to figure it out.
@rmackay9
My apologies for the mistake. and also i forgot to add the dropbox link. now its fixed!
Do you generally suggest PILOT_THR_BHV set to factory 0 or 4?
I have a slight feeling that this might be the cause, since from what i can see vibes are low and P/R Pid seem to be spot on, only Yaw needs additional tuning.
@rmackay9
After more investigation on the logs, there is a difference between CTUN.Alt R and CTUN.DAlt R parameters before landing. Since i have never seens ground effect before in any of the builds, do you believe that this could be seen as a ground effect result?
Since the Multi seems to have minimal vibrations, do you think this could be a usefull test?
Have seen the Ground effect compensation and i do recall a small bounce before leaning to one side and eventually fliping over.
Any help would highly be appreciated.
Any Help on this one would be appreciated.
A quick look at the logs
Your copter is very overpowered/underweight and is battling to slow the motors down enough to maintain stability.
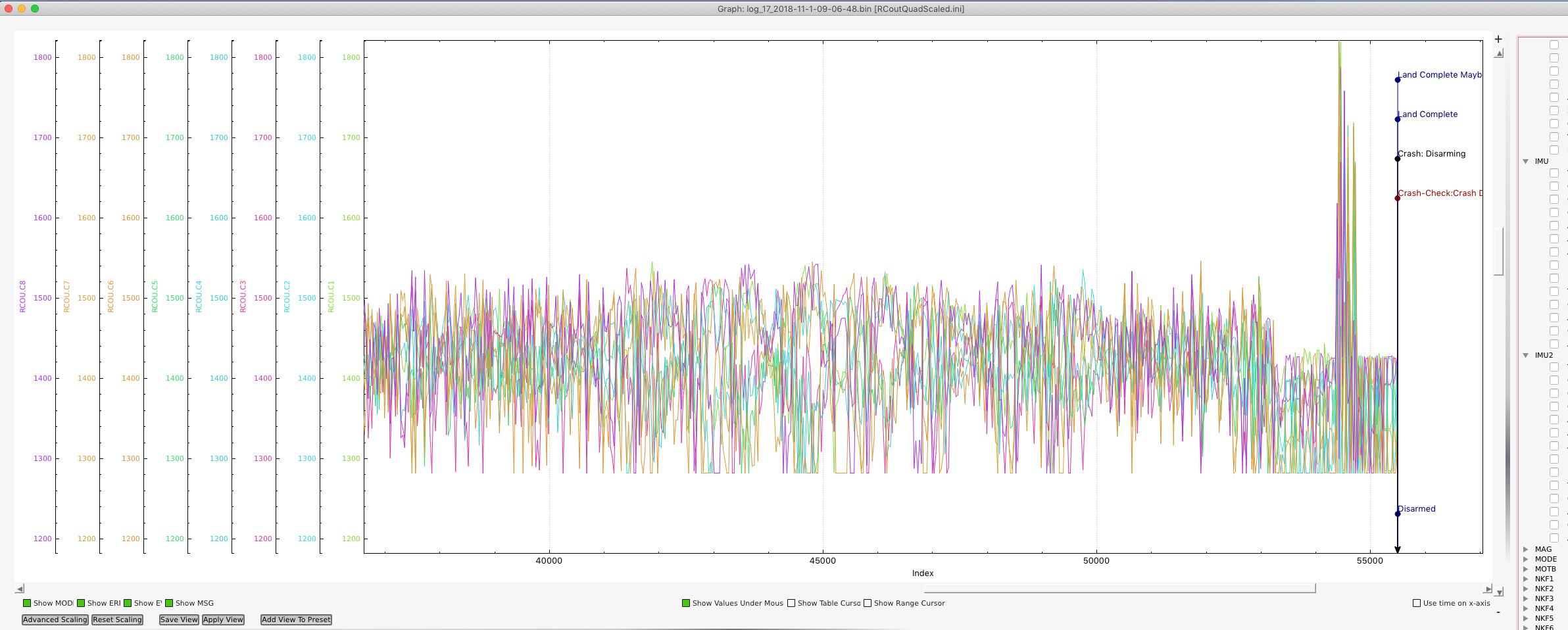
There is a distinct vibration event on the landing which may be a combination of power/frame flexibility in ground effect or upon touchdown.
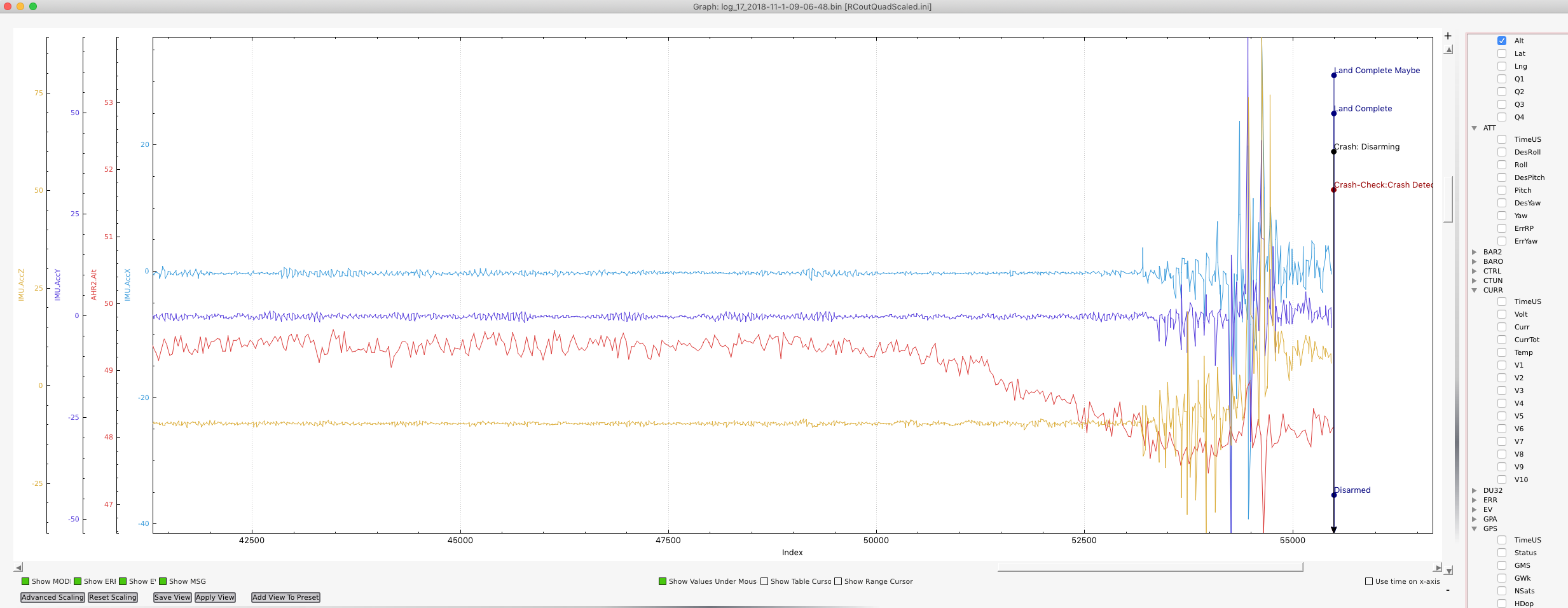
Notice the harmonic vibrations in flight.
I also note you land in Loiter.
When tuning copters, especially big rigs, Stab is advised for takeoff and landing.
At least until you have them sorted.
Try adding some weight and tune each axis individually
@mboland
Thank you Mike for all your assistance.
Since so far i have mostly flown stab with a little alth and loiter (on this log only) i have noticed that on stabilize mode i fly with about 50% of my stick input(which made it also wierd for me that the FC calculated Hover at 0.20).
After this log was created i took apart the complete landing gear because there was an unexplained play into them, thus making the whole frame wobble when on the ground and it seems that a bearing holder had broken off in flight(and the bearing flew off), creating that. Could the landing vibrations also be caused due to very “soft” FC vibration dampening? That’s creating minor harmonics that can result into ESC/MOT battling? Can there be too much dampening?
@mboland,
Harmonic vibration can also be due existing vibrations hidden by dampening base being too soft?
You are correct on loiter and this was my mistake, but since i had made a couple of flight on stabilize and landed good, i decided to test loiter. It seems now after solving a magnitude of problems found on this build, that plenty was wrong, including that i run filter at 20hz on autotune and aggressive to 0.1, when it would of been better to have correct filter and start from 0.75, make it flyable properly and then tune from there to 0.1