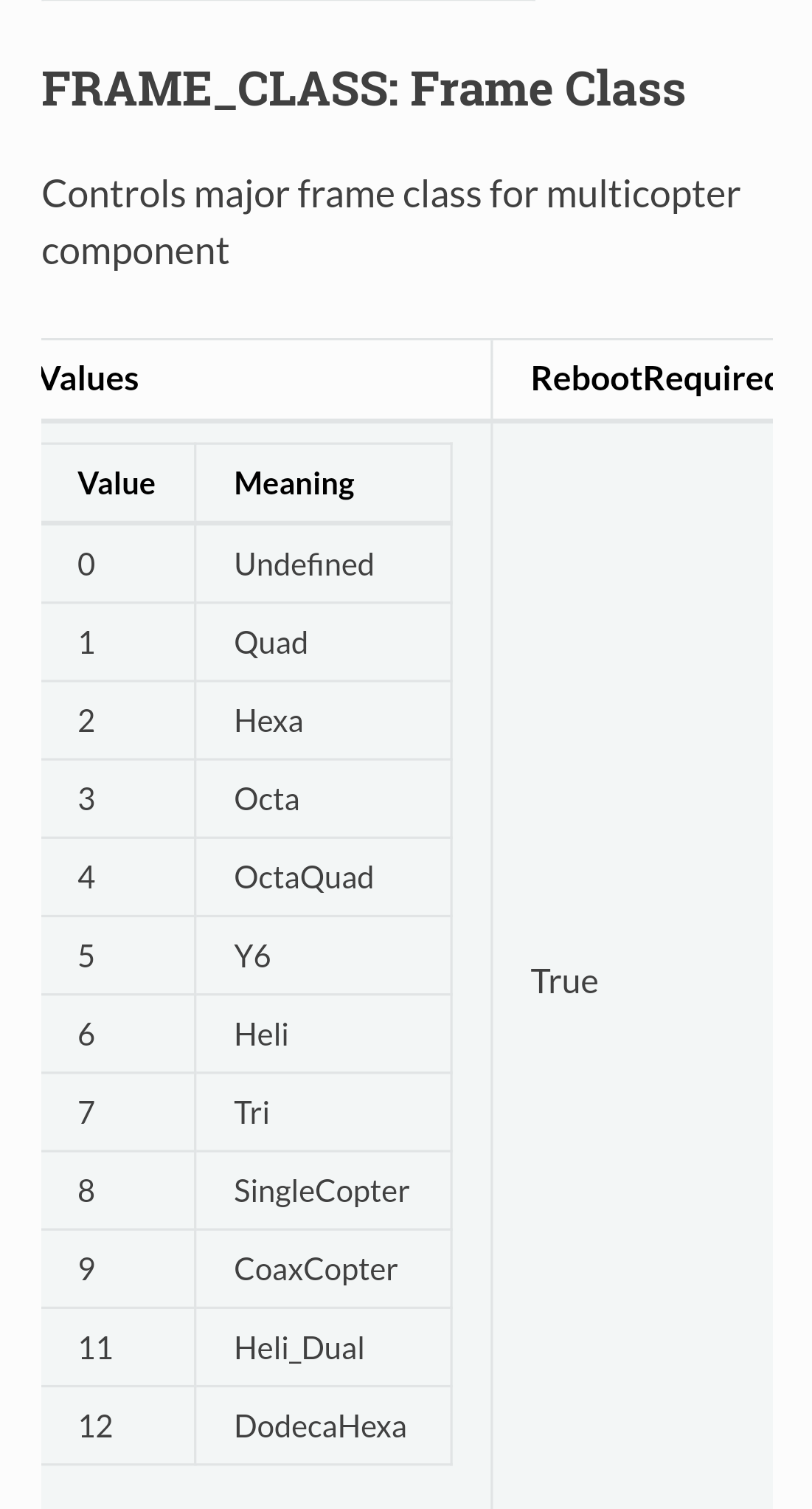
I am trying to set up a transverse rotors and set the frame type to 11. I added H_DUAL_MODE,0, H_PHANG1, H_PHANG2. But I cannot see those those dual rotor related param in the full param list. I alos use Mission planner to view the servo output, but motor 1-4 seems to show a single rotor setup with tailrotor servo. should I get motor 4-6 works as the 2nd swashplate?
What is the appropriate procedure to set up a dual rotor config using copter 3.5.5?