fresh install, new calibrations
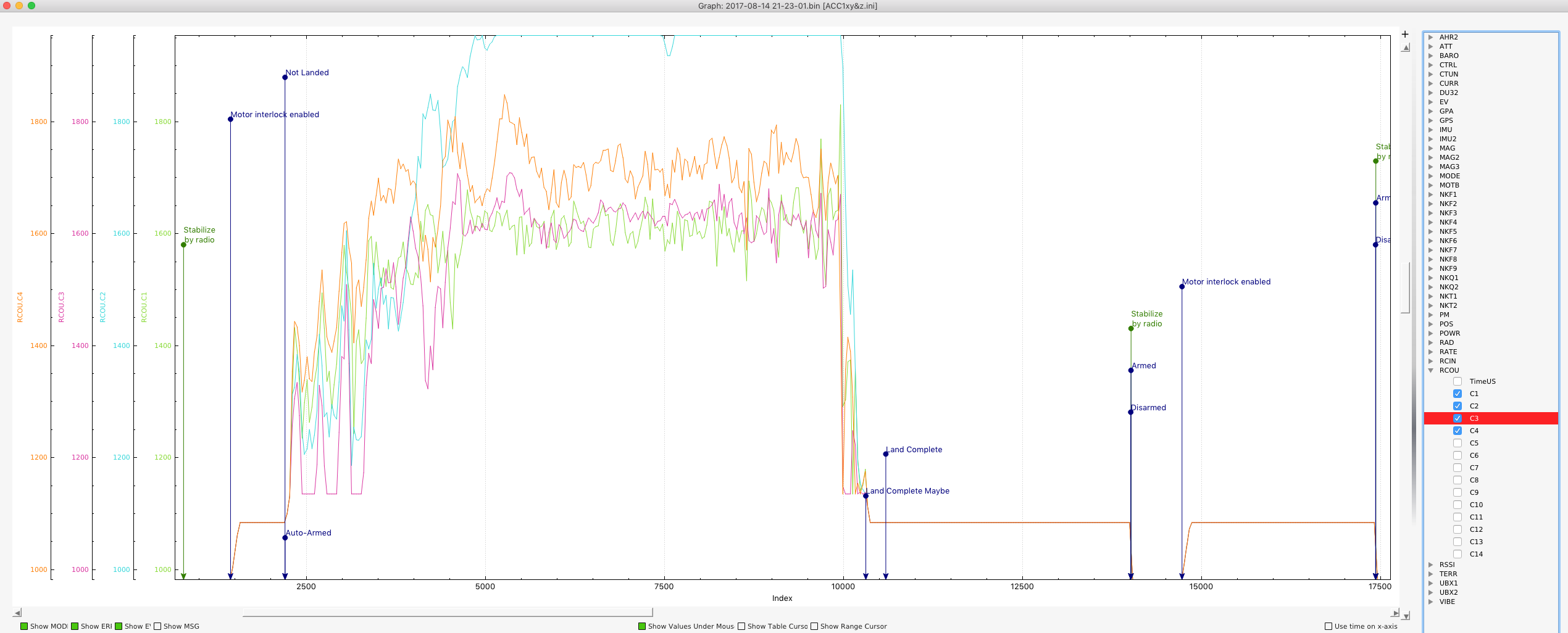
No matter what i do and what mode i select after takeoff no matter how much i push throttle quad is loosing altitude and crash. Not been able to go above 2m. No flip!
Maybe some more experienced builders can take a look at the log
Thanks !
@herus That is not a very helpful comment.
If you believe there is a bug then please post your log file so others can see what might be causing your problem.
Could you also describe your problem in detail and your setup and procedures you followed before your crash.
That would be much more helpful to others and may even help you solve your problem.
If it was a firmware bug then it would be showing up in a lot more posts.
Hello
prior to this flight i had same result, on motor test all of them spin in the correct direction, escs where calibrate and before take off everything looks correctly. Acc where also calibrated.
Copter does not flip on takeoff so prop orientation is right. Fc is in the correct orientation. Something else is failing …
Will do another test tomorrow and post back