JD-ETH
June 16, 2017, 7:43am
9
https://www.youtube.com/watch?v=yLjPHQXPwyk
The video is not that entertaining to watch
Hardware setup: 3S battery powers the 2.25 A 3DR Power module,
Connected output: PWM and Receiver
Setup: New Erle Image 09-12-16 and apm 3.5.0 rc7
[ESC beeps when powered but no pwm signal received]
After indefinite time, leads to crash and ESC beeps for several seconds again.
Doesn’t happen with the older release 3.4-rc2!
JD-ETH
June 16, 2017, 10:19am
10
Back then I didn’t look so carefully at the light I guess. I have this very interesting behavior, just starting arducopter it crashes consistantly, while in gdb in seems to run just fine. (same binary)
https://www.youtube.com/watch?v=0qRpY9q_2tY&t=3s
Very funny…
JD-ETH
June 19, 2017, 2:06pm
11
Yes it crashes in all conditions, but doesn’t in debug mode. Check my videos in the reply.
JD-ETH
June 19, 2017, 10:04pm
12
First time seg fault in debug mode:
[Thread debugging using libthread_db enabled]
Program received signal SIGSEGV, Segmentation fault.
Yay! At least we now know it happens in debug!
Can your provide a backtrace?
Maybe thread apply bt all (or whatever that syntax is…)
JD-ETH
June 20, 2017, 8:51am
14
Well I didn’t know what to do back then so I don’t have one.
But this seems to be known failure:http://discuss.ardupilot.org/t/arductoper-3-5-not-working-on-pi-zero/17105
And the issue:https://github.com/ArduPilot/ardupilot/issues/6233
Thanks to report by @ppoirier
The issue you are linking is fixed some time ago. What’s the exact version you are running? I don’t have a erlebrain 3. But I don’t see much difference from the others that would cause it on erlebrain3 and not on other rpi-based boards.
I’ll be back from vacations next week and can try to reproduce on some RPI boards
i can help you in something ?
But I don’t see much difference from the others that would cause it on erlebrain3 and not on other rpi-based boards.
The best guy to help with that is maybe @LanderU
LanderU
June 22, 2017, 8:25am
18
Hi @josepgomes ,
I will create a new OS for our boards, and test it.
If you can debug the firmware, please do it. Run with gdb and when the firmware crashed, type bt.
Regards,
@LanderU
Hi @LanderU ,
You think that we can just let the drone running without props in a desk and wait?
LanderU
June 22, 2017, 8:44am
20
Hi @josepgomes ,
yes, please. And run it with gdb, thank you!!!
Regards,
@LanderU
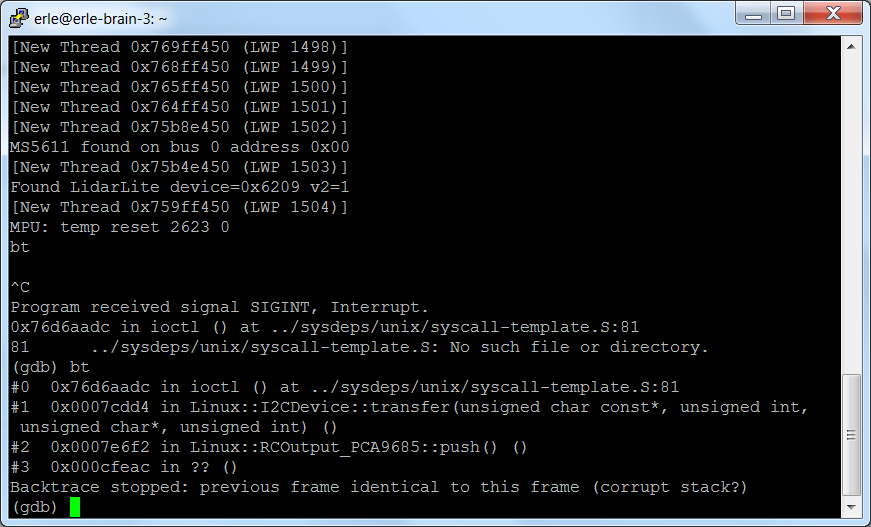
Hi @LanderU
Is this normal?
PS: i typed bt when the firmware crashed
LanderU
June 22, 2017, 9:16am
22
Hi @josepgomes ,
you need run the firmware like this:
sudo systemctl stop apm.service
sudo gdb --args ./arducopter -A udp:10.0.0.2:6000
When this message appears (gdb) type r+intro :
(gdb) r
When the firmware crash occurs, type bt.
Regards,
@LanderU
I was just going to check here the difference on erlebrain3… but there’s no erlebrain3 supported on upstream and checking the docs (http://docs.erlerobotics.com/brains/erle-brain-3/sofware/apm#compile-ardupilot-apm-from-its-s- …) it says to build for erlebrain2. This probably means I can test on my erlebrain2 when I’m back home.
@josepgomes , can you try this? https://github.com/lucasdemarchi/ardupilot/commits/test-stack
JD-ETH
June 22, 2017, 12:33pm
25
You have to wait first until it crashes and then type bt
Be careful it barely ever crashes in debug mode, so be prepared for a long run. Use micro USB and connect no sensors
But i typed bt when the firmware crashed. In debug mode happens anyway with our copter.
@lucasdemarchi , i don’t know how to test it
ppoirier
June 22, 2017, 2:33pm
28
Read Lander instruction above