EShamaev, the Zubax is connected directly to the Pixhawk CAN port , no other CAN devices.
The 3.5.5. simply do not initialise or recognise the Zubax, in Mission Planner messages the Gps was identify as GPS 1 even if ther eis only one GPS , this usually happens when the device is not initialise/recognise correctly.
I really need settings to analyse this, as on my setup it works.
Settings can be saved to file in mission planner. There are buttons on right side.
Also I need settings for Zubax.
Do you have Zubax or Zubax 2? Do you have pixhawk or pixhawk 2? Also please advice if this specific setup is working on previous versions?
rc5 worked fine on my AUAV-X2 using oneshot125 with BLHeli 14.3 ESC’s. Oneshot arming behaviour is much improved when using a safety switch.
1 Like
Ah. You shouldn’t see in-flight performance issues that vary based on what SD card you’ve got in.
Please eject the SD card and make sure you still get the bad performance.
Hi Corrado_Steri!
Yes! You can inject RTK corrections over your current telemetry link. Are you using Piksi V2, or the new Piksi Multi? This driver is for Piksi Multi (Piksi V2 is still supported via the previous driver). Here’s details for how to send SBP over UDP: http://docs.swiftnav.com/wiki/Alternate_Radio_Setup_(Send_SBP_over_UDP)
1 Like
Re ESC calibration problems, I’ve looked into it and found the issues and we’ve got some fixes that will go out with -rc6. I’ve put the details in this new topic..
Thanks for your efforts testing!
Thank you very much, i’ll keep an eye on it to see if any comes available any time soon.
I think smart batteries will be a major breaktrough in next months.
Corrado
I hope this post is ok here:
3.5Rc5 does not work on PixFalcon and 250 copter.
With 3.5Rc5 installed i get "Failsave, No Receiver"
But i can see all sticks movements in Mission-Planer and able to do radio calibration.
Still get "No RC Receiver"
I moved back and installed 3.4.6 Quad again.
Everything works immediately.
Have i missed something?
Best regards
Jochen Causemann
Jochen,
Re failsafe-no-receiver problem with PixFalcon, can you start a new thread and include a dataflash log? It might be necessary to set the LOG_DISARMED parameter to 0 1 so that the vehicle produces a log even before arming.
666 Quad, 3.5.0rc5
Having flown many flights in this frame (99) and over a dozen on rc5 and 2017-05-09 08-54-04.bin (4.1 MB)
had a crash. Logs attached. Took off flew a bit in PosHold, did a mission which was fine, and landed with a disarm, them re-armed took off ( aroung76% on TLog), zipped out a bit , then hit a LOW Battery warning and RTL triggered. ( previously have done many RTL just fine with rc5). Copter went wrong way and continued to climb… Switched to STAB, then Alt-Hold, but lost it and crashed. Did I just dumb-thumb this or what?
Thanks,
Joe
2017-05-09 08-52-02.tlog (915.0 KB)
At the point when RTL was started the copter lost stability as the Roll and Pitch where slightly out of whack. Then you entered Stabilize mode which corrected that but then shortly there after you cut power as it was rising at mid throttle. Copter fell.
Looks like it went out of control when it hit RTL.
Mike
Ops! , little late I test rc5, take off from tablet, pos hold, alt hold, RTL, Land from tablet, nothing strange, I update to r6 to check, nice work, thank´s
1 Like
Iseries,
Thanks for looking at the logs. Nice to have fresh eyes on a problem. It’s what I remember doing and what I too was seeing in the logs. Just puzzled on whey the RTL kept going the wrong way from home. I cut throttle as it was heading away and I knew it would hit in the empty field if I did so, rather than let it fly over the next hill… Do you know how to tell compass direction from the logs? Is it the Mag x and y value? Due to damage I haven’t had a chance to re-fly, but all gear is working OK on bench after the splashdown. ( I landed in the only 1 foot wide stream of water in the entire area!).
Thanks,
Joe
Joe,
Really sorry to hear about your crash. no fun for sure.
I also had a look at your logs and the final crash is most likely caused by motor 4 (back right) failing to spin-up after the period in which the throttle was at zero in stabilize. It shows the classic symptoms of an ESC/motor failure in that the bad motor (motor 4 in this case) goes high and it’s opposite (motor 2) goes low.
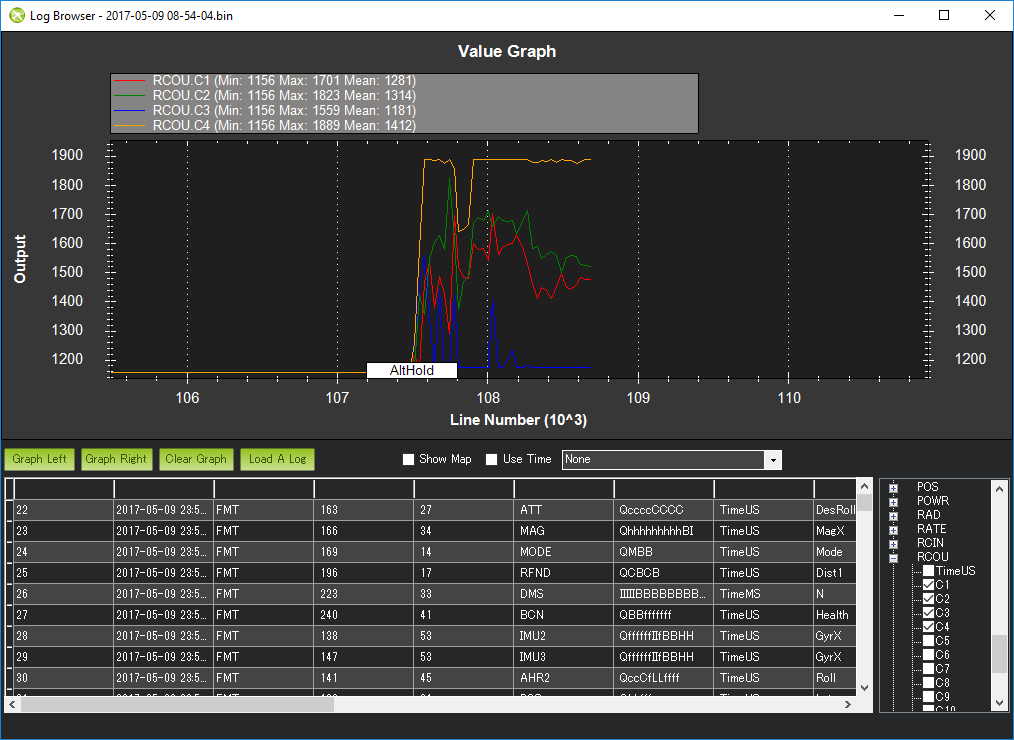
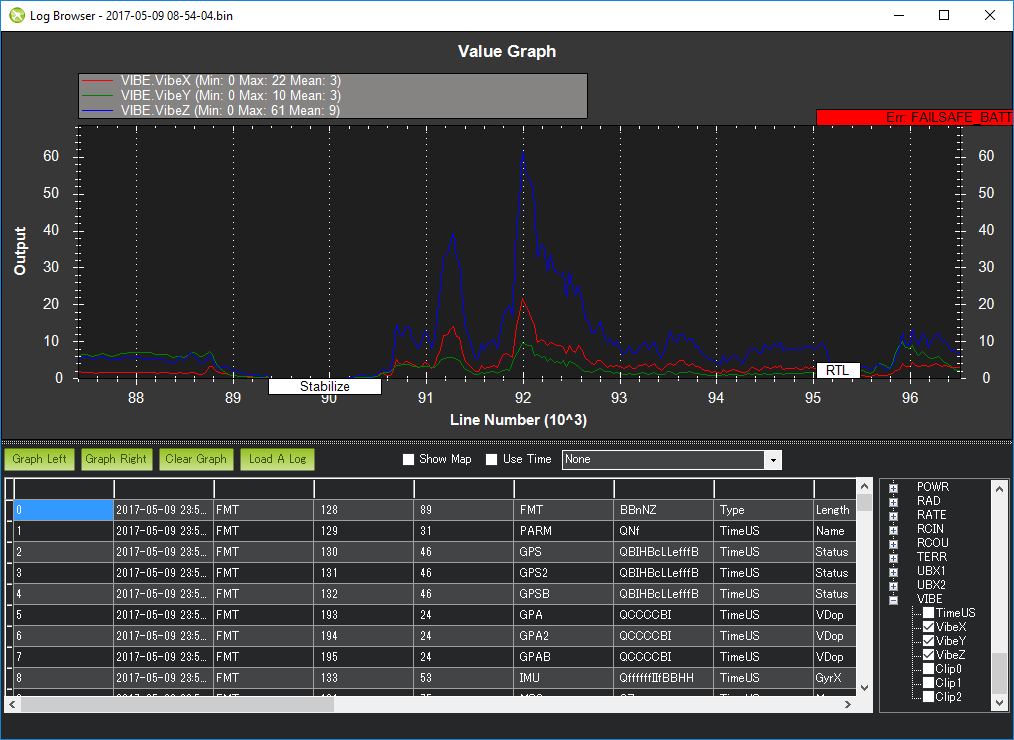
When the vehicle switches to RTL after the battery failsafe triggers, it appears the vehicle is moving quite quickly - climbing at 15m/s and forward at about 5.6m/s. I think it just takes a while for RTL to slow the vehicle down. It’s also possible though that the EKF’s position estimate is a little off because of the high vibrations (see below).
As a side note, vibration levels are a bit high when the vehicle is at full throttle.
Despite the tragedy, thanks for testing AC3.5!
EDIT: by the way, the battery failsafe triggers because the battery voltage drops about 3V when the vehicle is doing the power climb. A higher C battery might help with this. Also we plan to make some improvements in a future version to estimate the voltage drop of the battery based on current draw so when that’s done we won’t have these false positives on the battery failsafe.
Randy,
Thanks for looking at this. That frame has always been a bear to get the vibs down. I have been using one of the RC Timer Vib Domes, which saved the electronics in the crash. I appreciate you review of the logs and the motor input/output is one thing I didn’t review carefully, but it makes sense. I have stripped the motors to clean and I will probably just replace that motor. ( it’s a T Motor MN 3110, with 99 flights on it) ,and making other improvements on the rebuild. That battery was a year + old and I noticed a greater voltage drop on it as I log each flight. No worries as all it really cost me is 4 props and gives me the reason/excuse to rebuild it.
Joe
has the landing gear problems been sorted yet? ie the gear now going down in landing/rtl mode when used with a 2 position switch?
George,
I’ve just tested the landing gear in SITL and it seems to be working. I’m updating the landing gear wiki page as well a bit. One difference in the config between AC3.4.6 and AC3.5 is instead of setting RCx_FUNCTION to “29”, SERVOx_FUNCTION should be set to “29”. I think our parameter upgrade code handles this as part of the upgrade though.
Hello rmackay9
Sorry for answering so late.
I will try to pruduce a dataflsh log with LOG_DISARMED.
Which of the produced files you want me to send?
.bin .kmz .log .tlog .rlog .log.param
Viele Grüße
Jochen Causemann
Jochen,
Re the failsafe-no-receiver problem with PixFalcon, .bin files are the best. Also best to open a new thread so we can track it more easily.