I tested out 3.4 RC5 on my F550 Hexacopter today. The testing went well except for these items:
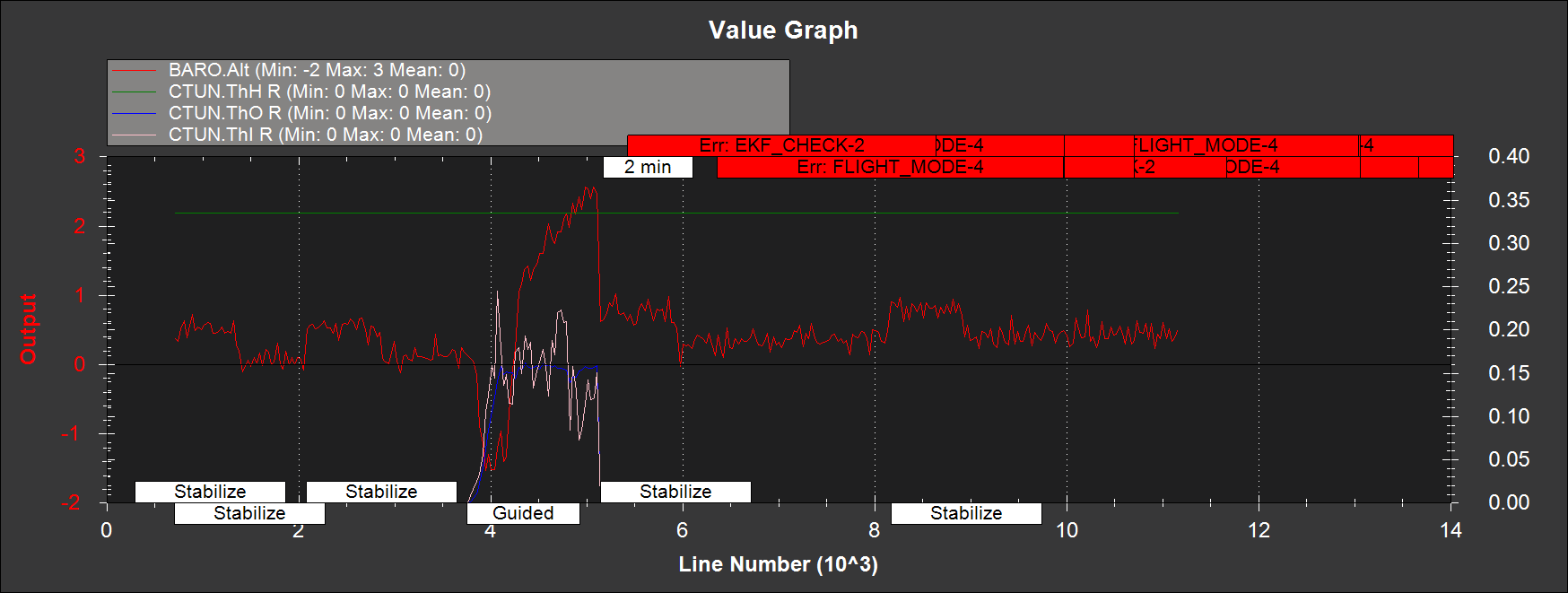
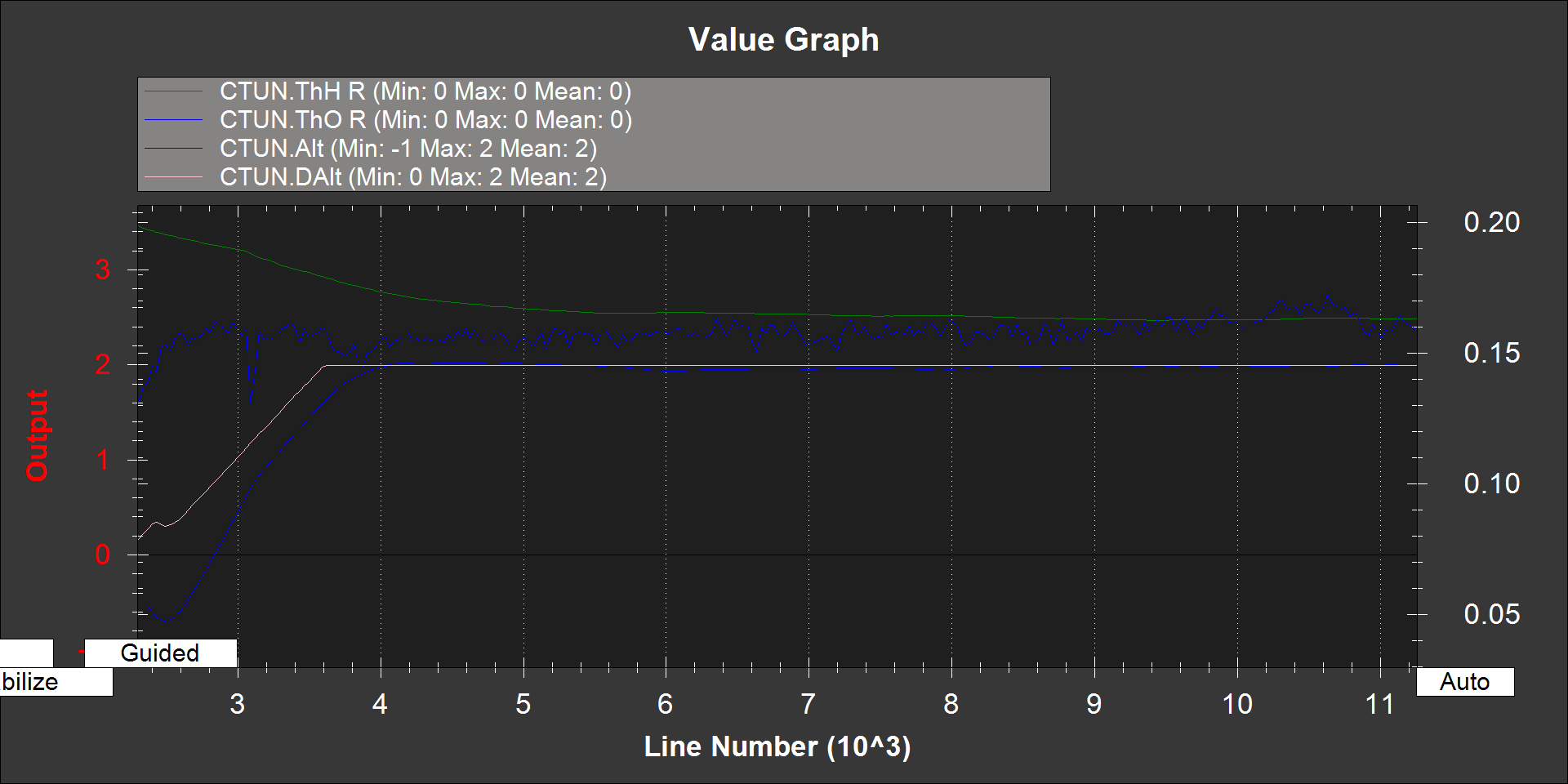
1.) I had my MOT_THST_HOVER set initially to .2159392 and had MOT_HOVER_LEARN=2 in RC2 and it worked fine. I upgraded to RC5 and attempted a guided takeoff and while hovering the copter cut power. It looks like MOT_THST_HOVER either got changed during the upgrade to .3350102 or was adjusted in flight.
Here is the log for the failed flight 135.BIN (414.1 KB)
Here is the log for the successful flights 136.zip (2.6 MB)
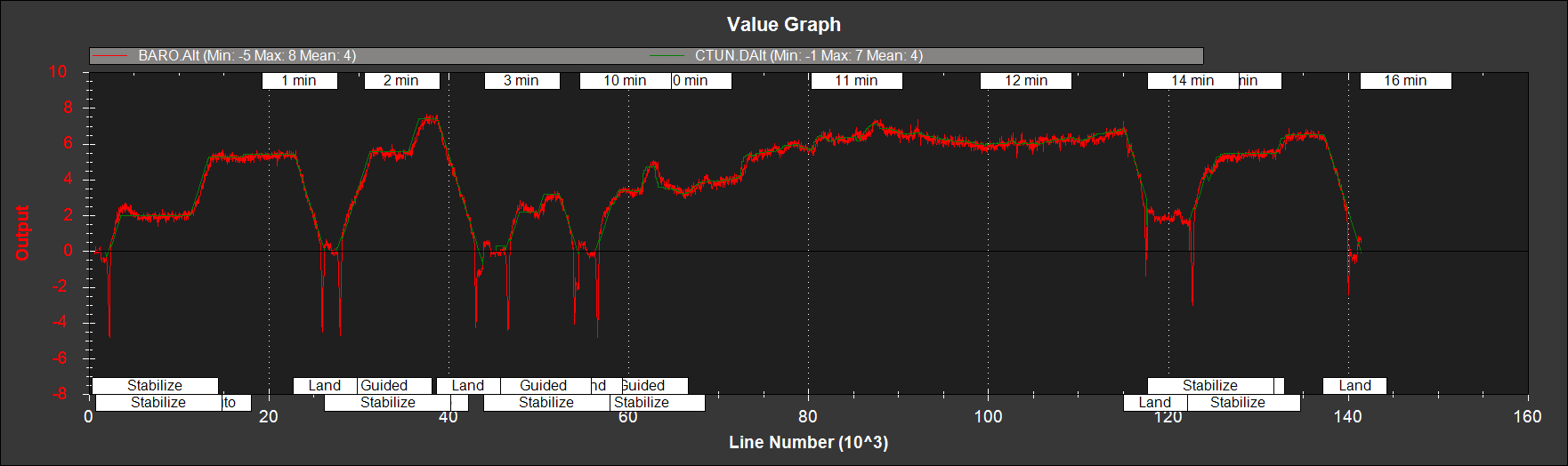
2.) It doesn’t look like the barometric altitude is getting reliably reset to 0 during arming. I noticed that uploading a new mission did reset the altitude for some reason.
3.) It still doesn’t gracefully handle the situation where there is no R/C. I still have to override Yaw on guided takeoff and Yaw, Pitch and Roll on landing to trimmed values.
One quick answer re the baro is that it doesn’t get reset anymore on arming. So the barometer is tied to the EKF’s internal origin which is never moved after being initially set. The reason we did this is because AC3.4 allows home to be moved around from the ground station and so a clearer separation of EKF origin and home was required and resetting the baro each time home moved and then coordinating that with the EKF so it handles the reset clearly seemed dangerous.
The reason I ask is that I noticed the initial altitude can be far off from zero (say -3 m), which can prevent guided takeoff or AUTO missions from achieving the correct altitude.
@rmackay9 I noticed that now the baro gets reset to 0 if I update the mission while the copter is flying. I’m specifying the 0th waypoint as well. Is it resetting based on seeing a new home waypoint?
I think resetting the baro upon arming made more sense. How can I work around the issue with RC5?
Please revert back to resetting the baro on ARM or provide a way to not reset the baro during a mission update in flight.