I am newbe, and i was build my first quadrocopter on the AQ-600 frame in the following configuration:
Pixhawk Clone
Flysky FS-i6S + FS-A10v PPM connetion to Pixhawk
SIK 433 mhz + GCS telemetry Tower
Ublox NEO-M8N
Racerstar RS30A Blheli_S 30A OPTO ESC’s
RCTimer 4215 (3507) 650KV Multicopter Brushless Motors
Zippy 8000 mah
HAKRC Storm32 gimbal
The three-position switch on the RC transmitter is configured to switch modes Stabilizer-AltHold-Loiter.
I usually take off in the stabilization, then I switch to Loiter.
Then I try different modes, learning to fly, etc.
I was try AUTO mode fist time.
I was set 9 points. At 9 point set RTL command.
Take off on Stab, turn three-position switch to Loiter then turn on Auto Mode by GS Tower.
Dron began to carry out the mission.
After 9 point dron began to return, and all was good.
When the drone fell to 4-5 meters, I decided to switch the mode in stab mode to take pictures of man.
Then the drone crashed.
When he started to fall - I have had to switch to Loiter.
But it did not help.
Here is a piece of video from a fall and log file. https://www.youtube.com/watch?v=79kahuS1u6U
Throttle too low after switching modes?
Auto will maintain throttle for the programmed altitude.
Switch out of auto to stab mode and if the throttle is less than mid the craft will fall.
I’m sorry, I just went by description.
After reviewing the video (thank you for having sound), I would think it was mechanical failure with the behavior I saw. It was a coincidence that it happened when you switched modes.
Unless one of the modes programmed was “flip” and you accidentally hit that.
PixHawk beeps on-board too when you change modes.
You should hear it warn you when you do not have enough sat lock for a GPS based mode.
Nice warning sound.
Yes.
Hard for the analyzer to make sense because of the different languages but I did see one thing that caught my attention.
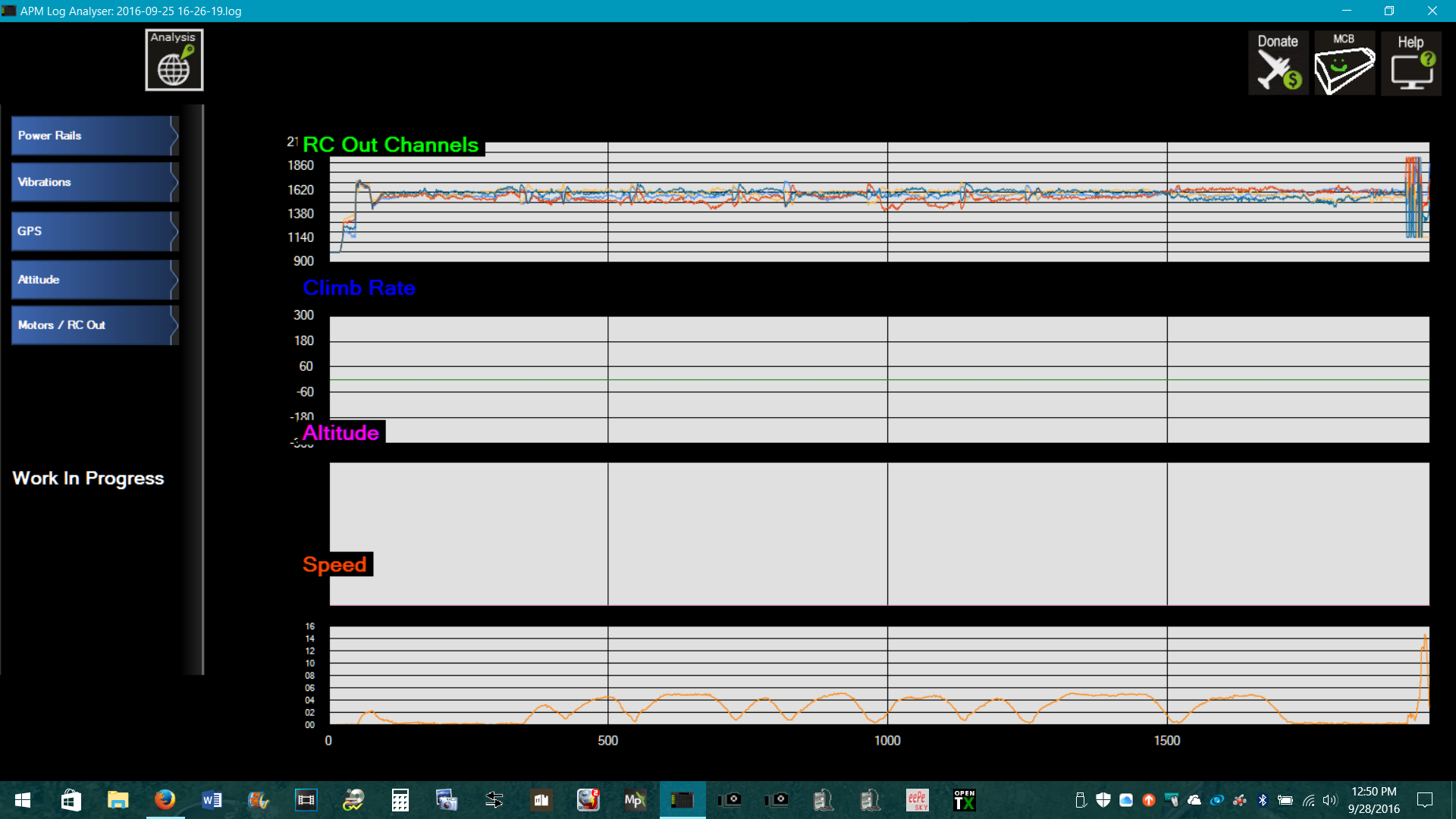
At the point of the first sign of trouble before the crash, all radio output went to the maximum level until the time of the crash.
what level of logging do you have on (LOG_BITMASK) and how long were you flying?
What made RC3Out go to max is the question?
Is the motor and ESC on RC3 still ok?
Have you tested all the motors, ESC, and other hardware to make sure they are operating?
I see similar scheduler overruns, GPS fails and Mag fails as a couple of crashes I have had on 3.4-RC5
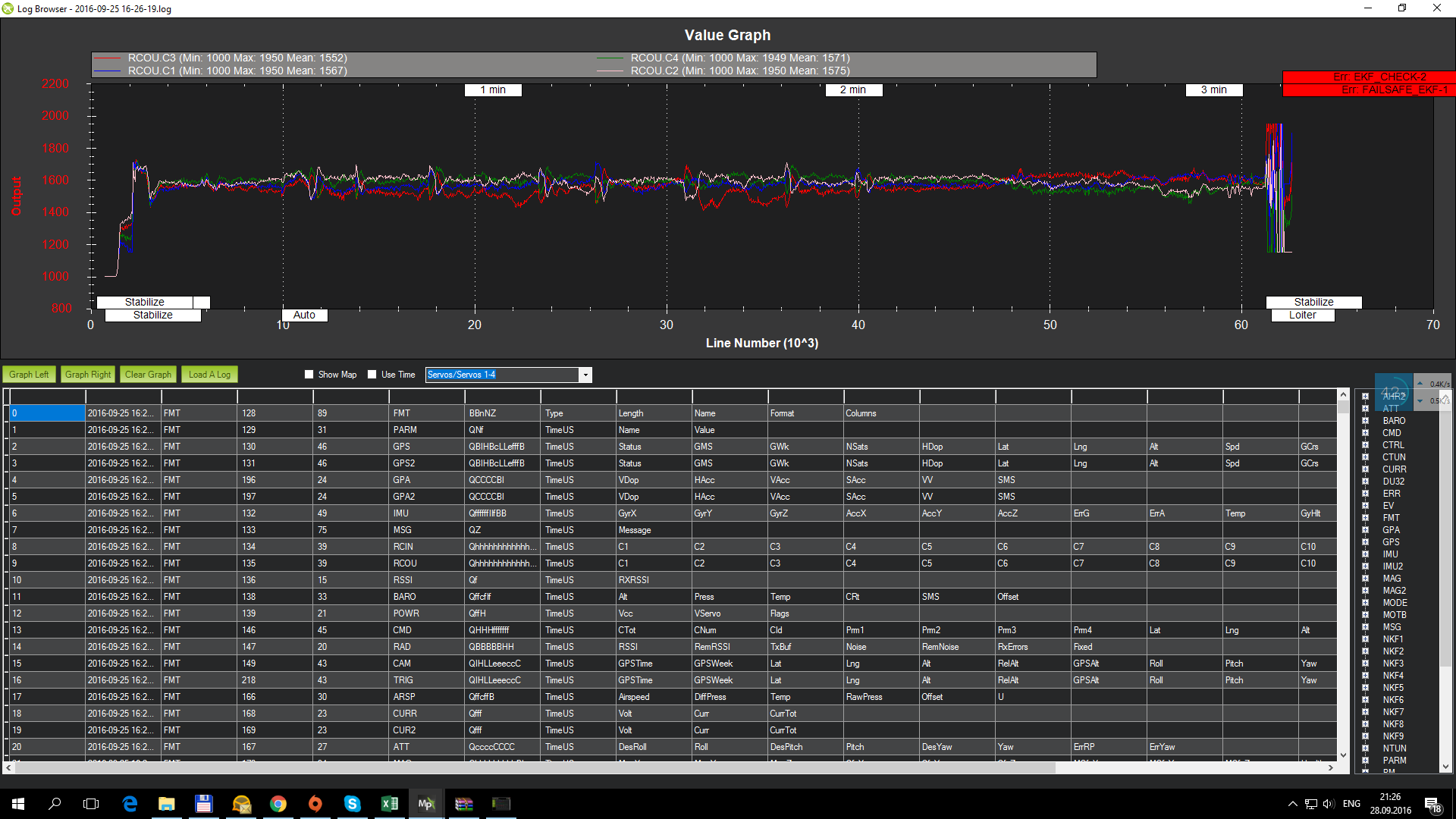
And intresting - why you looking for RC3, that going to MAX and not looking for RC4, that going to MIN in same time?
I was looking second log now. From 9_09_2016 crash.
The same picture - when dron recived “Switch mode to stab by Radio” - RCOUT3 - go to MAX, RCOUT4 go to MIN!!!
Why??? May be - its problem with arducopter Relise Candidate? Error in firmware?