Hi,
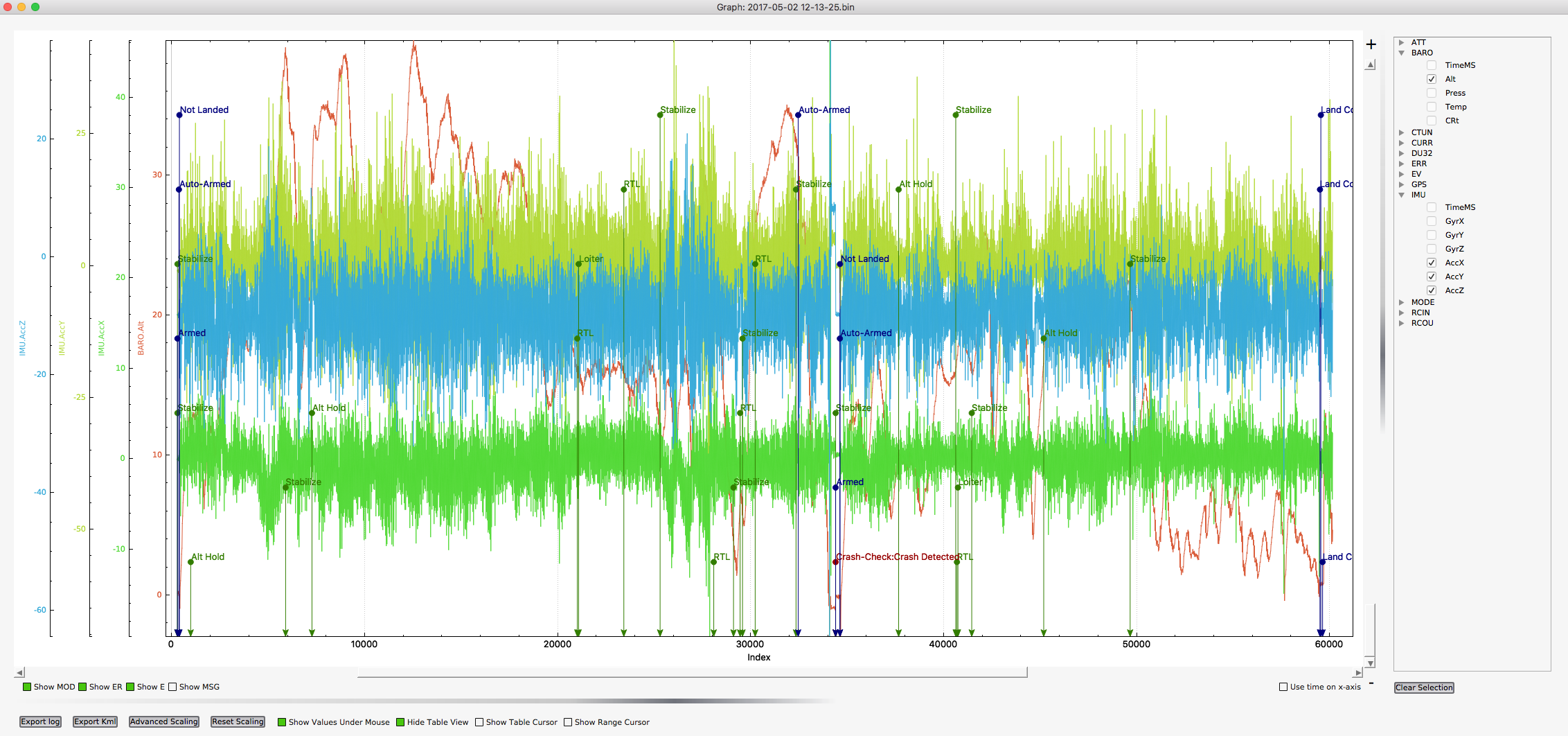
Using APM from CX-20 (open source) version 2.52, encountered few drops in Alt-Hold mode - copter just drops out of the sky, I’ve tried analyzing the logs yet can’t make solid conclusion to what is wrong ?
Any help will be appreciated, logs attached.
2017-05-02 12-13-25.zip (3.0 MB)