Hello,
I use a Pixhawk PX4 with Rover V4.5.7 installed with boat configration, I also use a Xbox 360 controller and a radio telemetry module to control it manually (GHz modules are not allowed in the project’s specification which our team is going to attent, hopefully).
I use Differential thrust boat configration for our teams project, I managed to control left aft and right aft thrusters with no problem. But our team also decided to use a bow thruster for docking and assisting turning maneuvers, I was able to adress the bow thruster on RC5 but it doesn’t stop when unarmed. So I decided to use this to my adventage, when our vessel dock we can unarm main thrusters and turn on the bow thruster seperately for fine manuvering. To do this I decided to add a relay module.
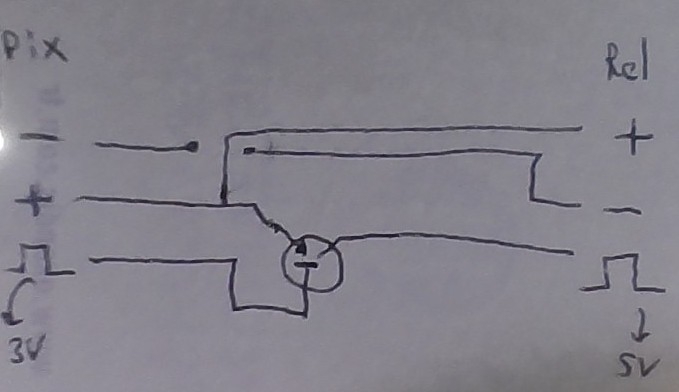
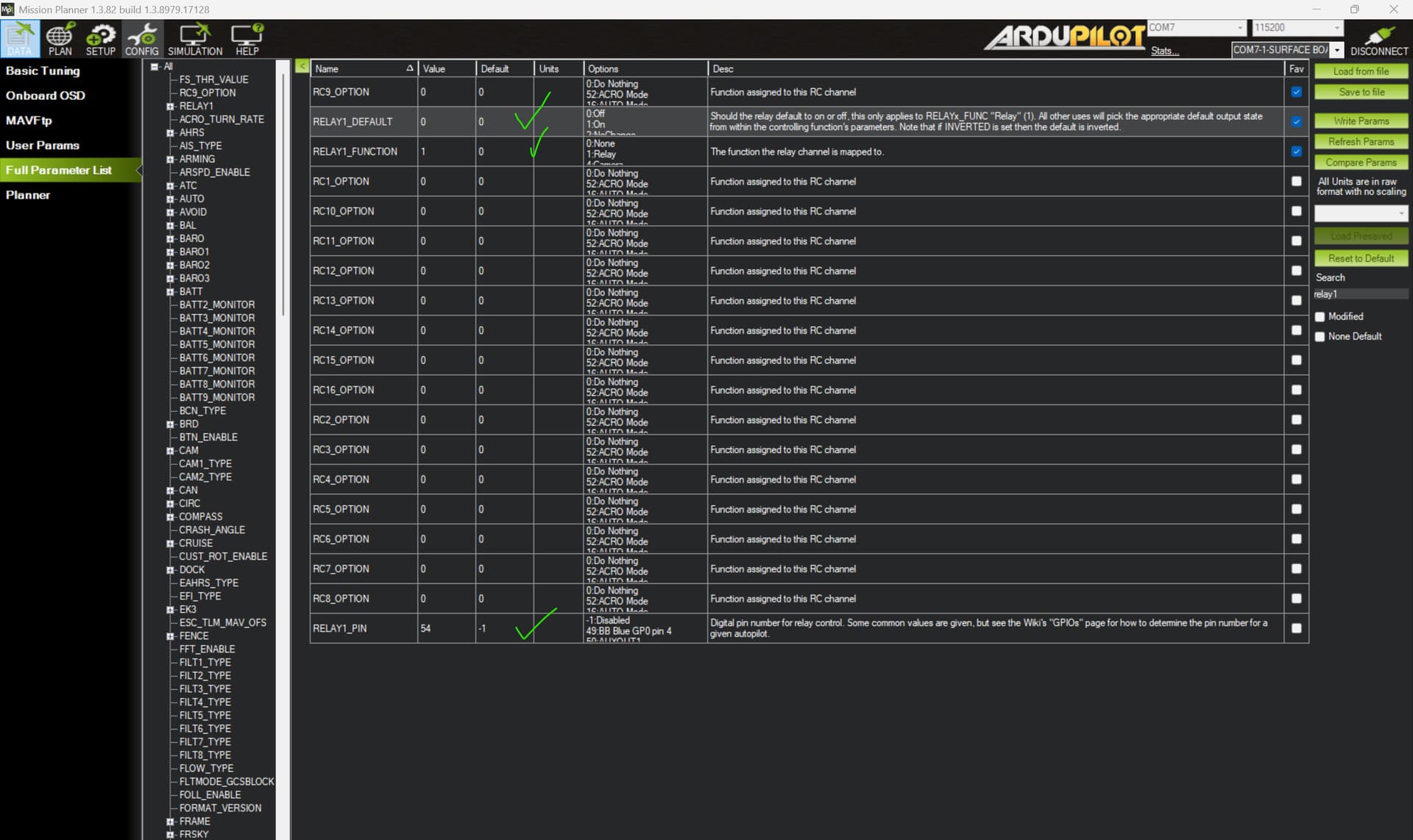
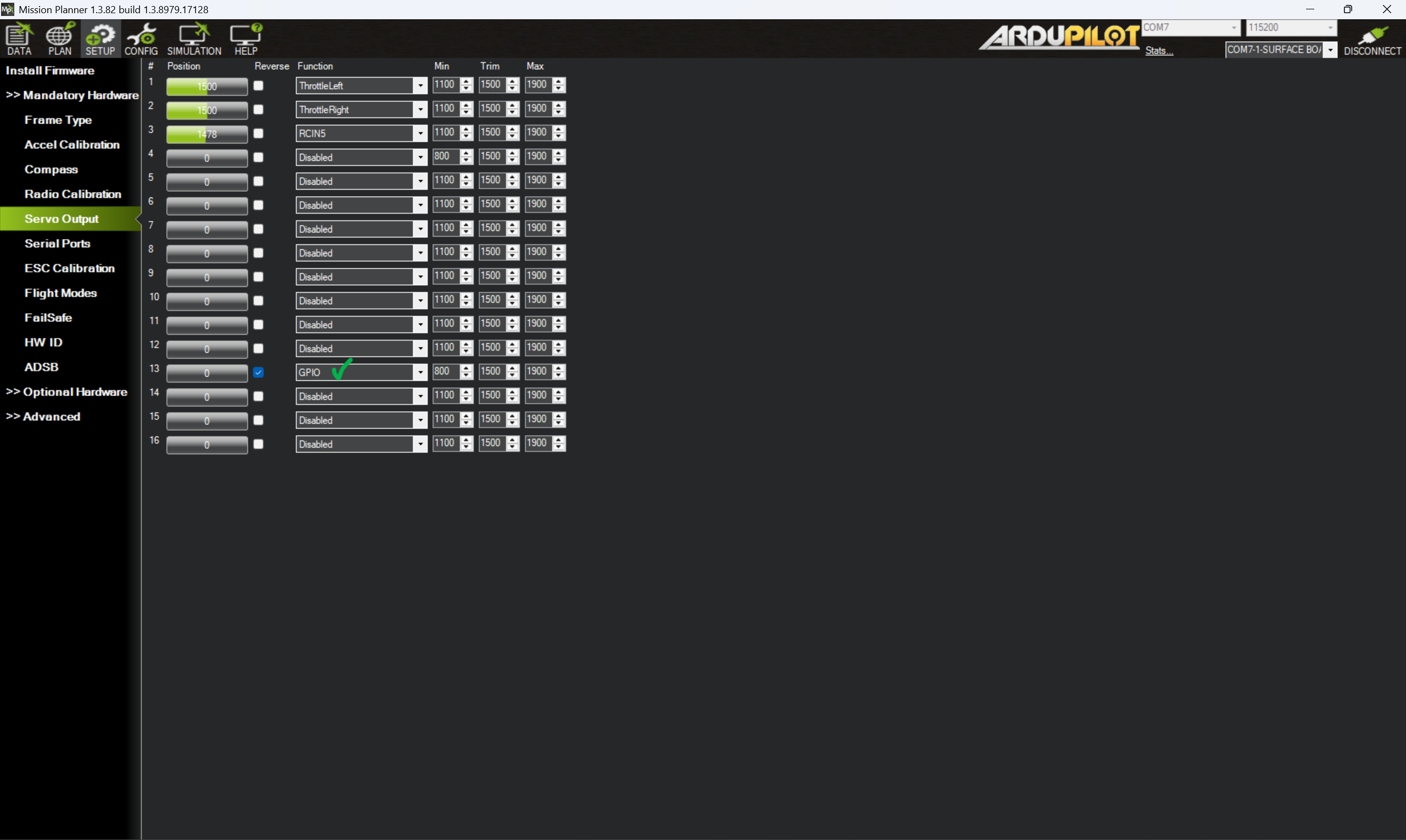
But the problem is that I can’t turn of the relay no matter what I do. I set the relay 1 pin to 54 (Aux out 5) and then I set the servo 13 function to gpio, this way I was able to flicker the relay when the relay 1 state was set to high for some reason. When it was set to high the relay

modules led gets a bit dimmer but never turns off, also the relay doesn’t turn off; it flickers a bit after a while (Probably coil gets too little power so the relay’s pin goes crazy).
So I need your help to adress this issue, thank you.