I am attempting to use a PixHawk 4 board flashed with ArduCopter 4.4.3 to control a camera gimbal. My use case is effectively that the gimbal is attached to a moving (non-UAV) vehicle and I want to use the pixhawk to keep the gimbal focused on a specific location as the vehicle moves around it.
First question - is it possible to use the pixhawk in this way / will I run into any problems if the board is not controlling other parts of a vehicle (ESC’s etc).
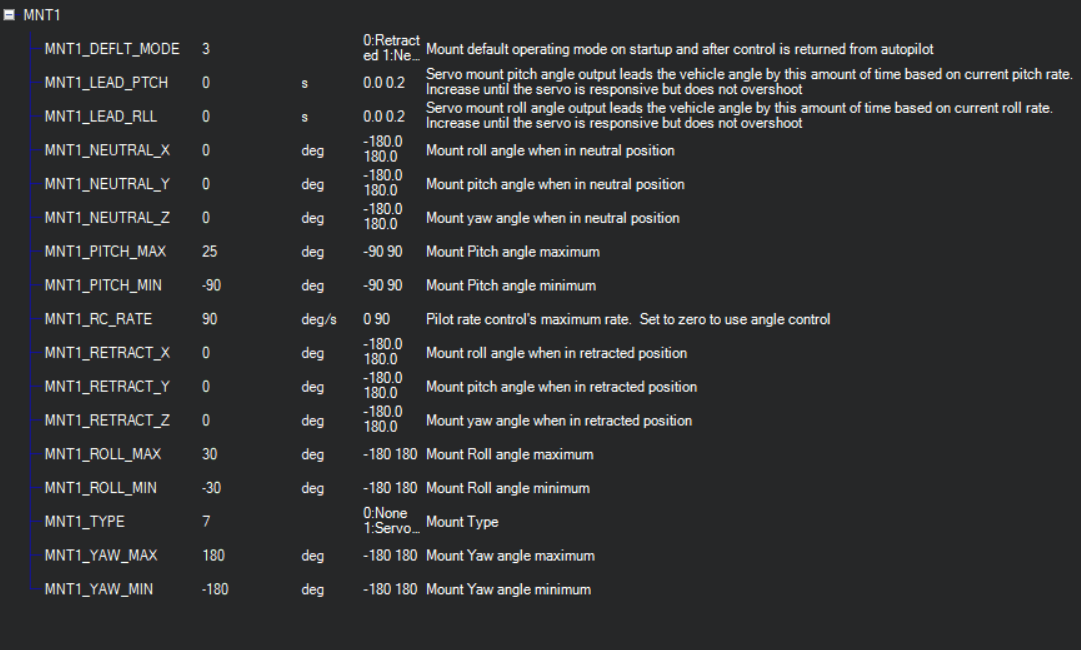
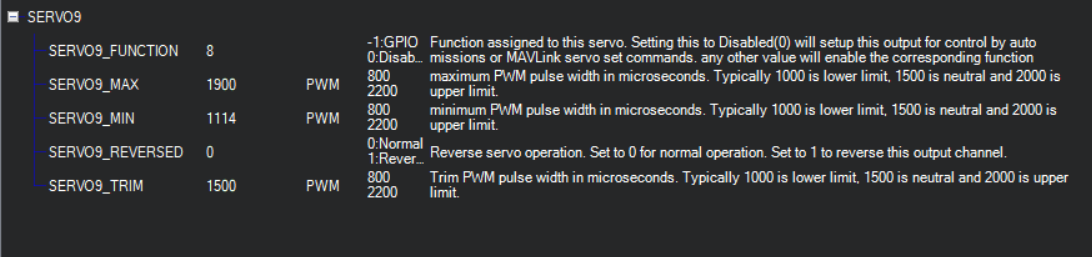
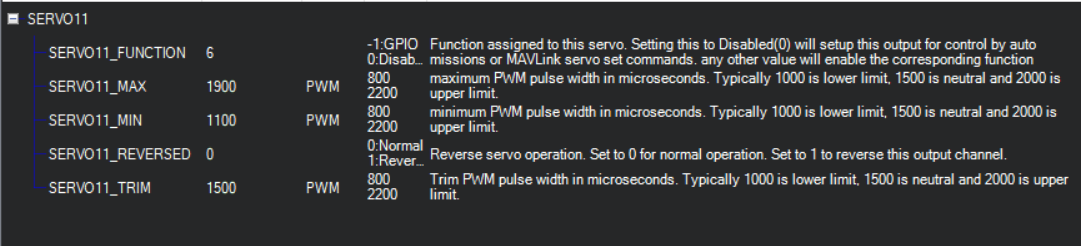
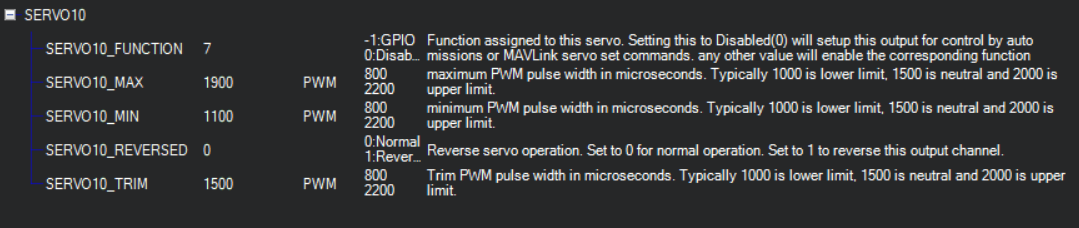
I currently have the board setup with an RC transmitter plugged into the boards DSM / SBUS RC. I then have the boards SBUS out going into the gimbal. I have set up all the parameters of the board manually according to the documentation. However, I am unable to manually control the gimbal with the RC channels as indicated in the documentation. If anyone could help advise what might be the problem / if my intended usage will be possible, I’d really appreciate it!
To clarify I also have a GPS module for the Pixhawk.
I am currently testing in an environment where I can’t get a solid GPS lock - does the board need to pass all pre-arm checks before it will communicate with the gimbal via SBUS?
Second update - I have installed the board on a copter with everything hooked up properly. The GPS signal is able to get a lock and the vehicle is armable. However I am still unable to control the gimbal with the RC channels or using the ‘payload control’ tab on Mission Planner. The settings I have provided earlier are still my parameters. Help would be appreciated!
Providing another update - I have the pixhawk and the camera gimbal talking properly to eachother now, I can control the gimbal through RC channels 6, 7, and 8. However, when I go to select a point on the map (via right clicking and selecting ‘point camera here’) the gimbal does not respond. I have a GPS that has a fix hooked up the Pixhawk. Any help would be greatly appreciated.
We’ve got these two pages on how to control cameras and gimbals. The gimbal (aka mount) is probably what you need.
I suspect the issue is that you’re perhaps not setting the gimbal mode? Mission Planner’s Data screen’s Action tab has a drop-down and button that can be used to change the mode.