Hi Ardupilot and MP experts,
I’m working on a project based on Ardupilot/MP, the final goal is to have a complete system to be used by people who are not drone pilot and who don’t need to understand how it works, non UAV professional.
So, I need to give this user some restricted actions like “start the system” “go for the landing” “stop mission”…, but without using MP screen because it’s too complicated.
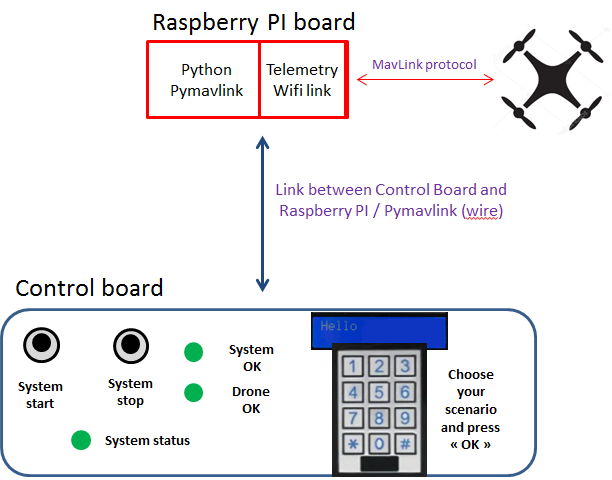
I plan to use a digital screen with buttons and LED in a command board on a box, so something like a remote GUI that will communicate with MP in two ways : send commands and receive informations.
I tried to find a way to do that but I failed, do you have any ideas ?
Many thanks for your help
nico
1 Like
Use pymavlink instead of MP
Thanks , I’ll see Pymavlink. Do you know if it’s possible to load automatic scenario with this tool ? By scénario, I mean : a serie of waypoints with different speed, altitude. ? Or it’s mainly use for MavLink communication ?
MAVLink communication is simply a protocol, it carries out lots of different informations, including mission waypoints and mission execution commands. I think that all GCS supports mission planning.
1 Like
Just clarifying to you that the GCS (including Mission Planner, QGroundControl, Pymavlink, among others) and MAVLink are distinct concepts.
1 Like
Pymavlink ist the preferred way to build a mavlink interface software.
And you can and must use this generated code to build your GCS.
One other way of doing this is to change the source code of Qgroundcontrol to meet your needs. There is documentation on how to do this.
2 Likes
Hi Bruno and Amilcarlucas,
This picture below to explain my case. Am I right or wrong, is it possible or not ? Like you said, it’s like building a new GCS with limited possibilities, I hope it’ll not be to technically complex …
It is possible. Our own GCS has a single button.
And the German government has authorized it’s usage even by non trained pilots. But it is not easy. We needed a lot of time and a lot of code to do it.
How good are your programming skills?
1 Like
Well, not good, so not possible …
Or the only “feasible” way I see is to finally using Mission planner and try to build a display adjusted for my needs, with only minimum commands available
I don’t know if I understood your architecture right… Why do you need a raspberry and a control board? Couldn’t it be a personal computer? This way you could get Mission Planner or QGC source code and customize for your own application, I think this approach could simplify your life.
Hi Bruno,
If I can design as I want MP/QC, you’re right it’ll be the best. The final goal is to have a tool easy to manage, with the exact level of commands needed by a final user that is not an UAV pro and really easy to manage and understand, and as cheaper as possible.
So I have to study how I can shape the code of MP/QC.
1 Like
The code from qgc is meant to be user customizable.
I advise you to customise that one.
2 Likes
Thanks for this advice, I’ll study that
1 Like
Me too! It is much easier than bringing up a very non-conventional architecture to solve such simple problem.
I read the documentation for user/dev on QGC website, and effectively it seems that the UI can be shaped as I want, or very closely
But I need to find solution and maybe to build and add some icons on the display, I’ll work on it.
Bruno, Lucas, many thanks for your help, I think I’ll open a new topic soon on the “QGC” forum, I hope we’ll discuss later on this interesting subject !
1 Like
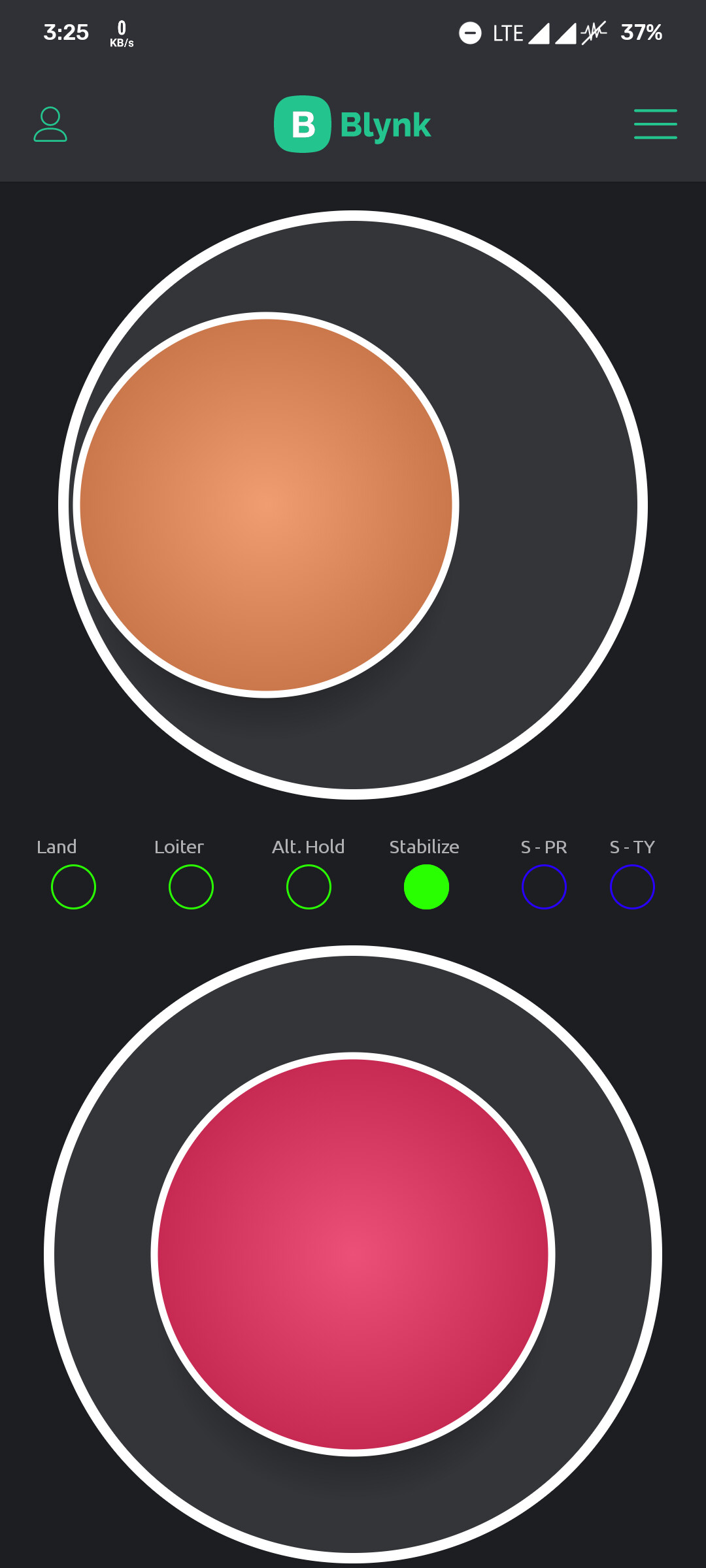
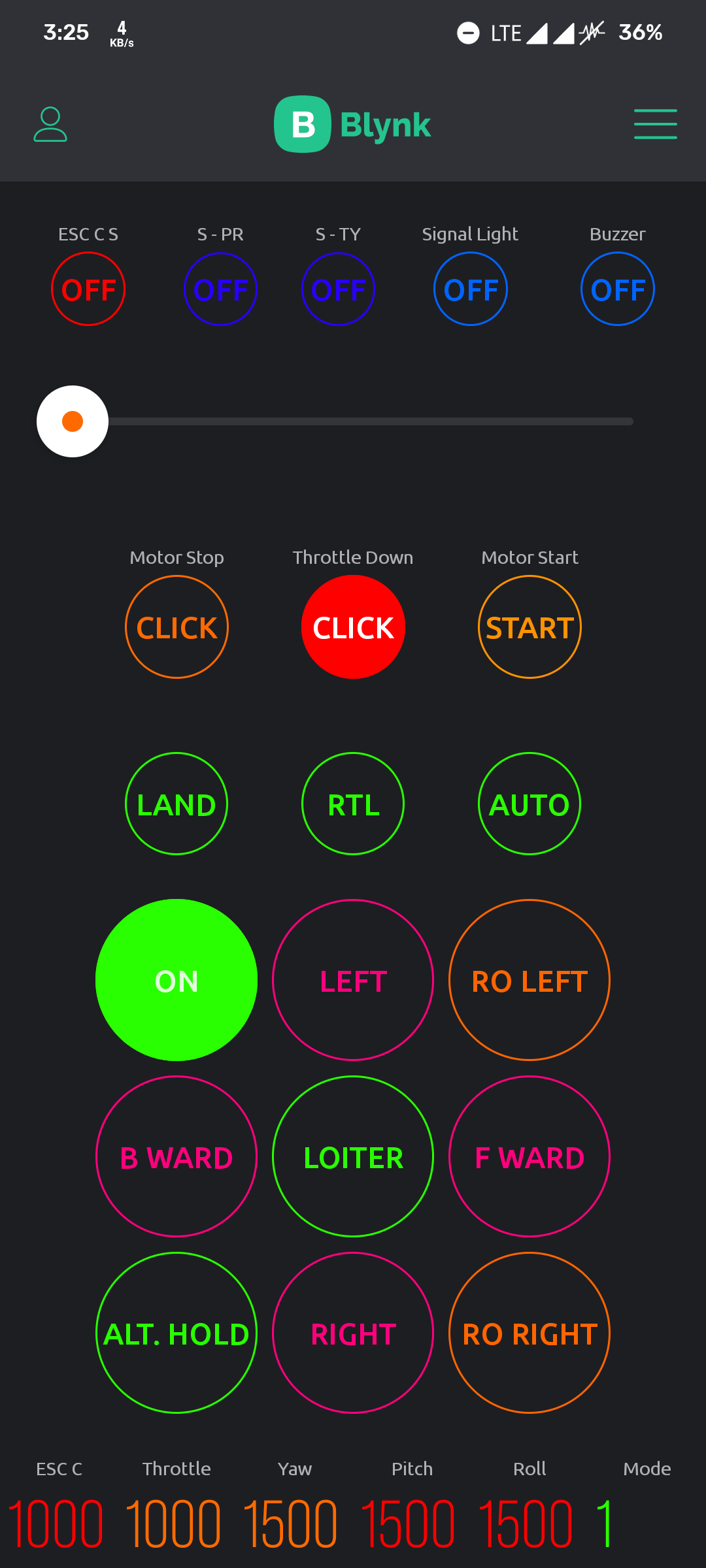
I Have currently a cheap project about a Drone controller (ESP8266 board) controlled by the Blynk app that can easily customize like the Buttons and other controls, Technically it’s an IoT project because the connection is on the internet but only works as a TX-only (Transmit) and the esp8266 as a receiver but you can also use another ESP8266 as a telemetry for QGC.
You can check my Github repository on how it works:
Flip your Phone to be work
1 Like