Hi everybody, I would like to do some real tests with an RC model. I need to use an autopilot (PX4) and to collect informations during the flight that I would get back at the end of the flight.
It is possible with this configuration using a companion computer, PX4 and a GROUND STATION CONTROL (GSC).
Like that : http://ardupilot.org/dev/docs/raspberry-pi-via-mavlink.html
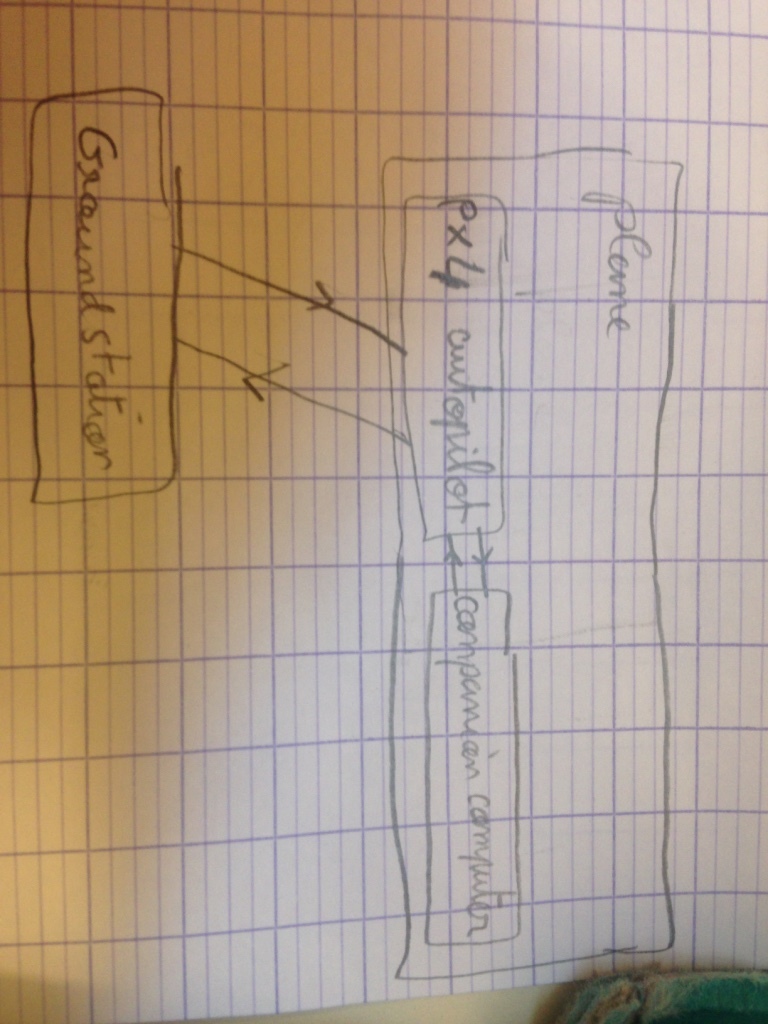
The connection between GSC and PIxhawk is etablished with wifi. But I would like to do so without any GSC because and don’t need it.
I want only the companion computer to control my plane.
Is it possible to have this kind of configuration ?
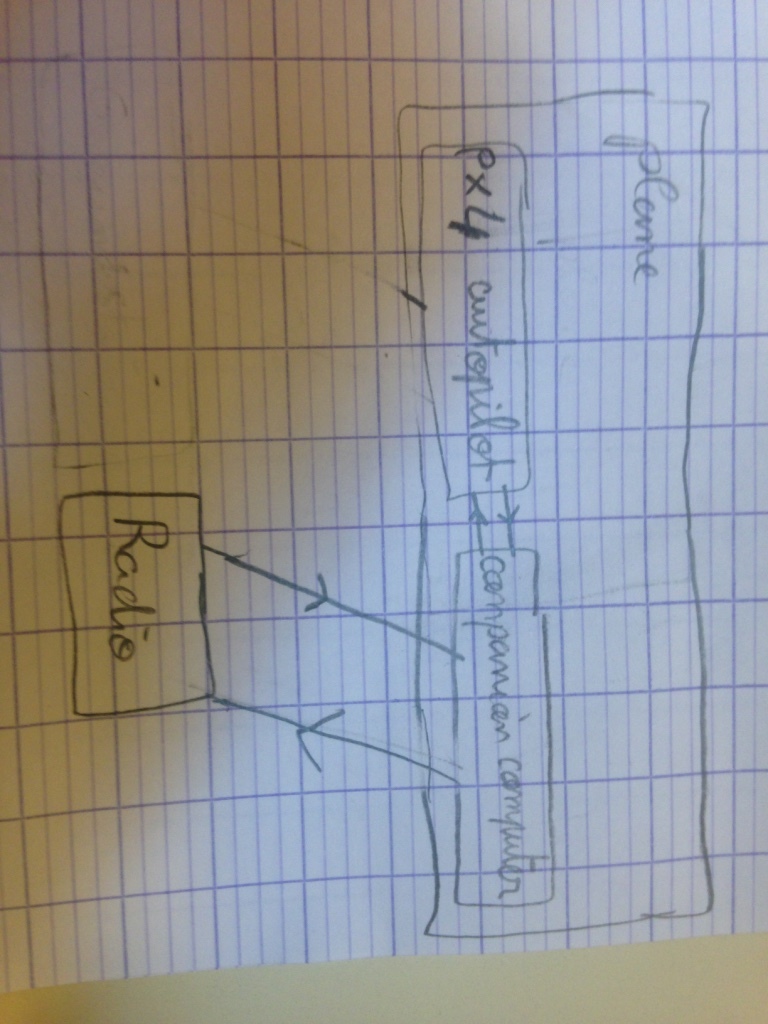
If so could you explain me ? Thanks would help me a lot !