I only looked at the last log in that list.
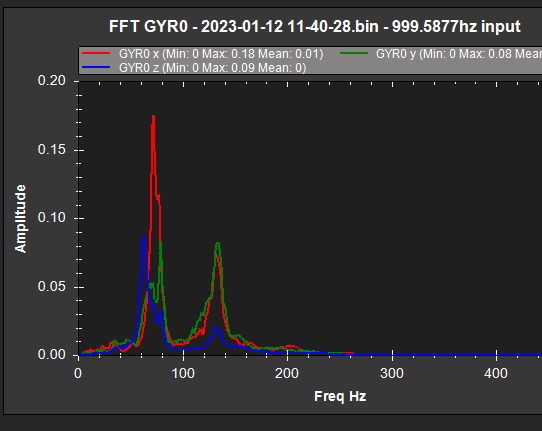
Adjust these and the harmonic notch filter should be good now! It took a couple of tries to gather enough clear data.
INS_HNTCH_FREQ,35
INS_HNTCH_BW,17
INS_HNTCH_HMNCS,7
INS_HNTCH_REF,0.24
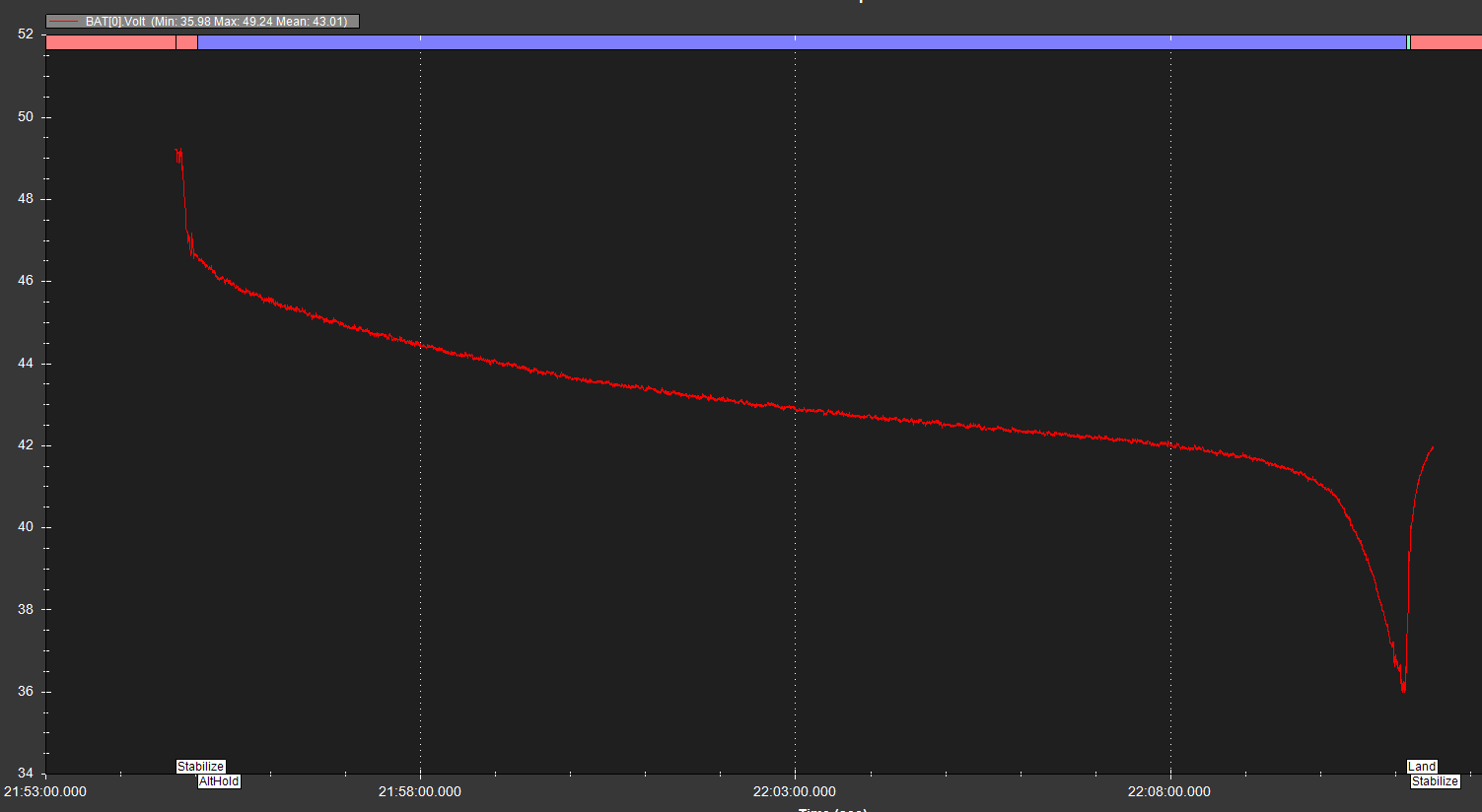
Danger point!
You are destroying the battery - see the rapid drop off at the end? That battery will be of very limited use now.
EDIT: actually I apologize if I missed these bad battery settings earlier, I usually pick up on that stuff. I guess I just checked if they were present and skimmed over them.
You have the battery settings wrong, I cant work out what they would relate to.
Assuming you have a 12 cell Lipo - change them to these:
BATT_ARM_VOLT,44.30
BATT_CRT_VOLT,42.00
BATT_LOW_VOLT,43.20
MOT_BAT_VOLT_MAX,50.40
MOT_BAT_VOLT_MIN,39.60
and
BATT_FS_LOW_ACT,2 or 3
If those values give you trouble, DO NOT change them - recalibrate your voltage sensor or get a new battery.
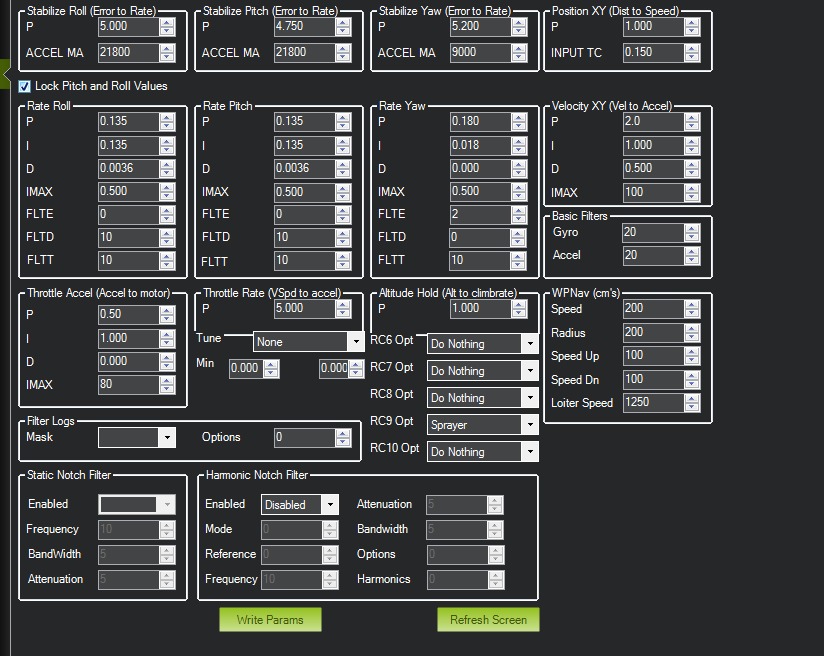
Try these PIDs and see if there is better stability.
ATC_ANG_RLL_P,6.0
ATC_ANG_PIT_P,6.0
ATC_ANG_YAW_P,4.5
ATC_RAT_RLL_P,0.12
ATC_RAT_RLL_I,0.12
ATC_RAT_RLL_D,0.005
ATC_RAT_PIT_P,0.12
ATC_RAT_PIT_I,0.12
ATC_RAT_PIT_D,0.005
If stability is worse just land immediately and put back the old values.
You should be able to run a pitch and roll Autotune though, AUTOTUNE_AXES,3
When you initiate Autotune let it finish and just reposition and land without changing out of Autotune mode.
Disarm and wait a couple of seconds for new PIDs to save.
Then you can arm and fly with the new values.
You can do Yaw Autotune separately if everything is working well.