Hi,
I recently upgraded from arducopter 4.0.3 to 4.2.1 (I know - it’s been long overdue).
I am using GPS blending (GPS_AUTO_SWITCH = 2, GPS_PRIMARY = 0, GPS_BLEND_MASK = 5)
While reviewing logs I am getting continuous gps_primary_changed messages over the entire log.

These gps_primary_changed messages always appear in pairs (~20ms apart).
The gps swaps to GPS 0 from GPS 2 then back again straight away.
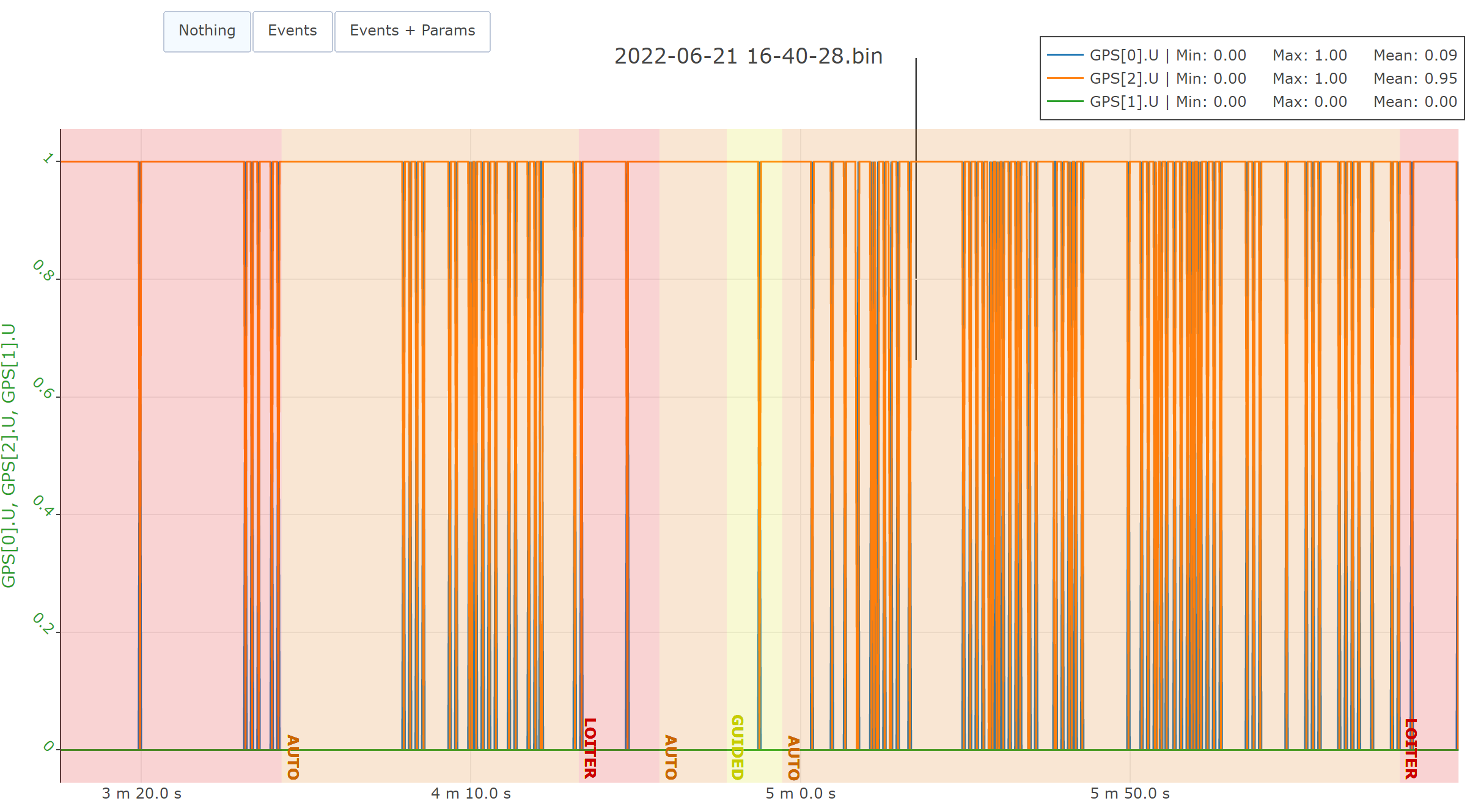
As far as I can tell GPS 2 is the virtual GPS which is generated by the GPS blend, and GPS 0 is the physical primary GPS.
All GPS have a constant 3D fix and both GPS 0 and GPS 2 have identical satellite count throughout (24 - 25 sats in the example flight)
I do not understand why it would use swap to GPS 0 when the blend performance is still good, why the primary gps is swapping only to immediately swap back so quickly, and why they are swapping at all when the status and stat count are identical.
Any ideas what is happening here?
Thanks!